














 13 / 16
13 / 16

О нагрузках на элементы конструкцииМногоцелевого лабораторного модуля…
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 2
135
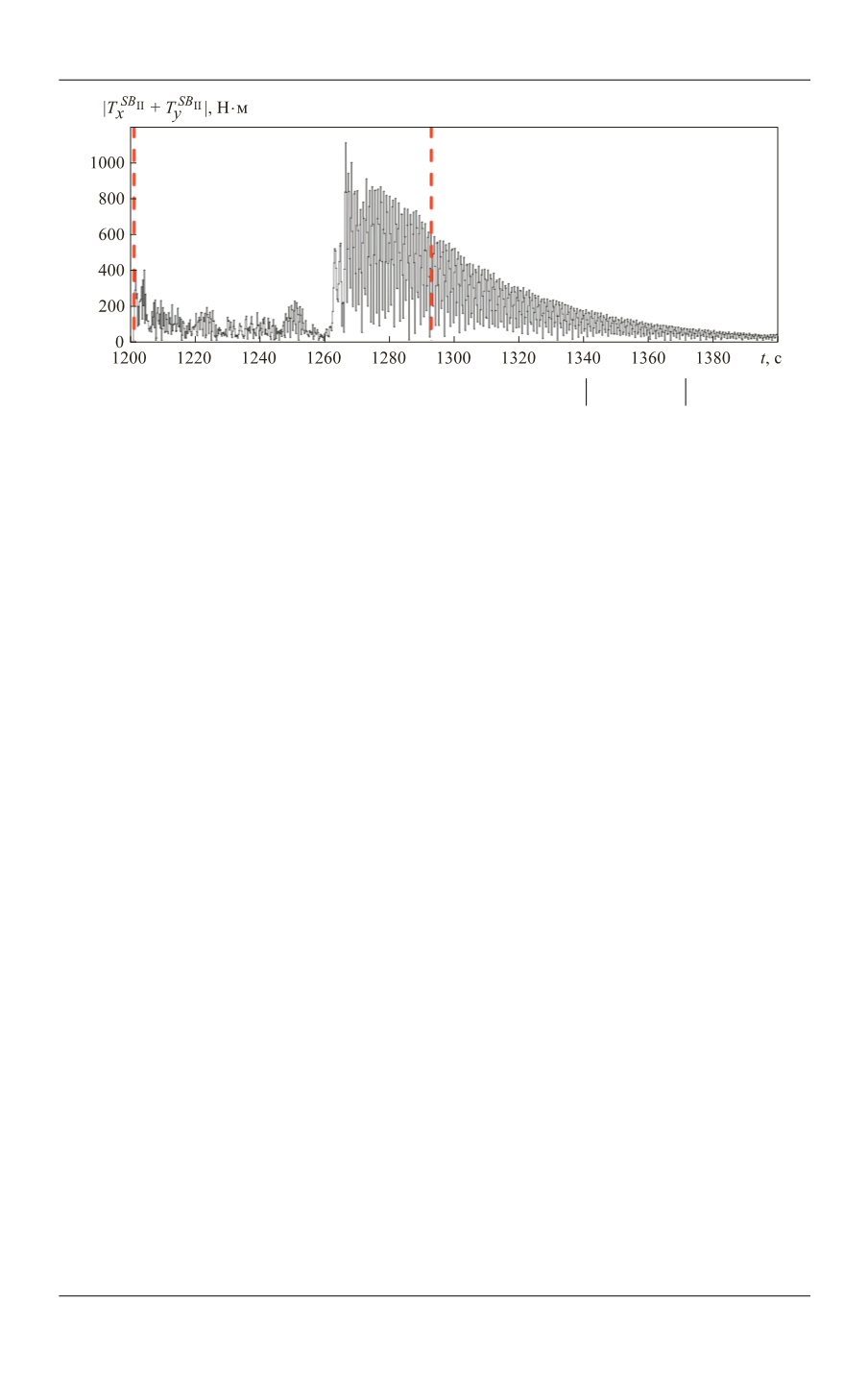
Рис. 7.
Изменение модуля суммы изгибающих моментов
+
II
II
SB
SB
x
y
Т Т
во время
разворота вокруг продольной оси
Из данных табл. 6 и рис. 6, 7 следует, что при развороте вокруг продольной
оси МЛМ имеются незначительные превышения моментов, которые так же, как
и на режиме коррекции орбиты, мало влияют на прочность конструкции.
Заключение.
Для оценки прочности конструкции МЛМ определены воз-
действия работы исполнительных органов на приводы солнечных батарей
МЛМ МКС для различных этапов полета. Алгоритмы расчета нагрузок на при-
воды интегрированы в состав автоматизированного рабочего места разработчи-
ка алгоритмов системы управления движением и навигации, в рамках которого
создан формат для контроля сил и моментов, действующих на приводы солнеч-
ных батарей в результате работы системы управления движением. Проведено
моделирование различных этапов полета. В результате анализа моделирования
выявлено, что незначительное превышение допустимых нагрузок происходит
при работе ДКС и при пространственных разворотах вокруг продольной оси
МЛМ. Однако число циклов нагружения на данных режимах находится в допу-
стимых пределах.
ЛИТЕРАТУРА
1.
Легостаев В.П., Марков А.В., Сорокин И.В.
Целевое использование РС МКС: значимые
научные результаты и планы на следующее десятилетие // Космическая техника и техноло-
гии. 2013. № 2. С. 3–18. URL:
http://www.energia.ru/ktt/archive/2013/02-2013/02-01.pdf2.
Прутько А.А., Сумароков А.В.
Разработка модели нагрузок на элементы Многоцелевого
лабораторного модуля на автономном участке полета // Навигация и управление движени-
ем. Материалы XVIII конференции молодых ученых. СПб.: Концерн «ЦНИИ «Электро-
прибор», 2016. С. 516–522.
3.
Сумароков А.В.
Об управлении движением Многоцелевого лабораторного модуля с по-
мощью реактивных двигателей на автономном участке полета // Навигация и управление
движением. Материалы XIV конференции молодых ученых. СПб.: Концерн «ЦНИИ «Элек-
троприбор», 2010. С. 157–164.
4.
Сумароков А.В.
Управление движением Многоцелевого лабораторного модуля посред-
ством двигательной установки // Труды РКТ. Серия 12. Вып. 3. Королёв, 2012. С. 12–16;
87–90.