














 6 / 18
6 / 18

А.Г. Лесков, Е.В. Селиверстова
102
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 6
Open Dynamics Engine [9]. Но несмотря на явные достоинства, метод V-Clip
сложен в реализации, требует предварительного расчета областей Вороного.
Результат его работы нуждается в дополнительной проверке и фильтрации.
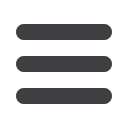
Авторами с помощью пакета Bullet Physics Library был проведен расчет гра-
ничных точек области пересечения (находящихся на границе области пересече-
ния) поверхностей пальца кисти Schunk SDH и объектов при захвате ОМ в виде
детской игрушки и яблока.
Результаты расчета приведены на рис. 4 (точки обозначены зеленым). Из
рис. 4,
а
видно наличие ложных граничных точек области пересечения, распо-
ложенных вне поверхностей моделей ЗУМ и ОМ; рис. 4,
б
иллюстрирует случай
неполного определения граничных точек. Результаты моделирования, выпол-
ненного с использованием Open Dynamics Engine, аналогичны и обладают
такими же недостатками.
Рис. 4.
Моделирование пересечения полигональных моделей звена ЗУ и ОМ
с использованием Bullet Physics Library
Недостатком рассматриваемых алгоритмов является их применимость толь-
ко к выпуклым полигональным моделям, что требует
дополнительных вычислительных ресурсов для пред-
ставления полигональной модели в виде некоторой
декомпозиции, состоящей из выпуклых многогранни-
ков. Далее предлагается алгоритм решения задач узкой
фазы, свободный от указанных недостатков.
Описание оригинального алгоритма узкой фазы.
Рассмотрим случай пересечения поверхностей двух
объектов. Обозначим эти объекты соответственно
A
и
B
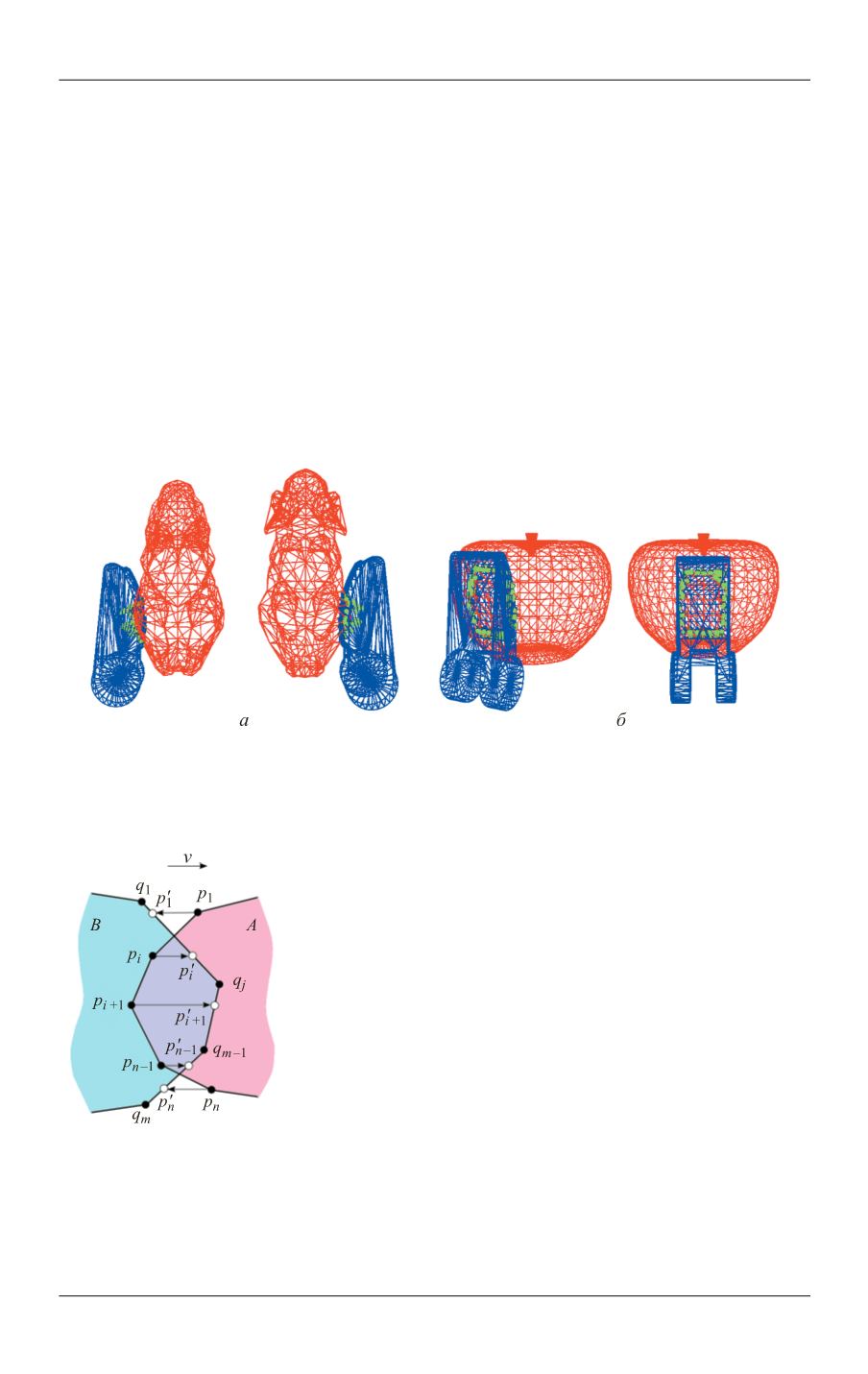
. Будем считать, что объект
В
перемещается относи-
тельно объекта
А
в направлении вектора
v
(рис. 5).
Вопрос о выборе вектора
v
будет рассмотрен далее.
Пусть
1
,...,
n
P p p
— множество вершин полиго-
нальной модели тела
А
. Пусть также
1
,...,
n
P p p
—
соответствующее множество проекций вершин
P
на по-
Рис. 5.
Проекции вершин
полигональной модели
тела
А
на поверхность
полигональной модели
тела
B
вдоль вектора
v