














 2 / 18
2 / 18

А.Г. Лесков, Е.В. Селиверстова
98
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 6
При контакте деформируемых элементов ЗУМ с деформируемыми ОМ про-
исходит изменение первоначальной формы контактирующих элементов. В на-
стоящей работе контакт между деформируемыми элементами определяется как
геометрическое пересечение поверхностей первоначальных (еще не деформи-
рованных) форм контактирующих элементов. Такое рассмотрение геометриче-
ски имитирует контактные деформации. Отметим, что приведенное понятие
пересечения поверхностей является условным, его использование — общепри-
нятым приемом при моделировании захвата тел [3].
Одним из способов синтеза захвата является офлайн-планирование по по-
лигональным моделям ЗУМ и ОМ [1], обеспечивающее предварительную оцен-
ку возможных способов захвата. Моделирование происходит путем пошагового
изменения положения элементов ЗУМ для перевода его в состояние «схват
закрыт».
В настоящей статье рассматривается один из центральных вопросов, возни-
кающих при моделировании захвата упруго деформируемых объектов, — обна-
ружение пересечений поверхностей ЗУМ и ОМ. При решении этой задачи
необходимо установить факт пересечения и рассчитать его параметры: область
пересечения, которая представляет собой фигуру, образованную в результате
конъюнкции фигур ЗУМ и ОМ; глубину проникания ЗУМ в ОМ при захвате,
т. е. минимальное расстояние, на которое нужно развести эти объекты, чтобы
их поверхности перестали пересекаться; вектор, вдоль которого отсчитывается
глубина проникания.
При моделировании захвата упругих тел перечисленные параметры использу-
ются для определения геометрии пятен контакта и эпюр нагрузки, которые участ-
вуют в расчете сил контактного взаимодействия между ЗУМ и ОМ.
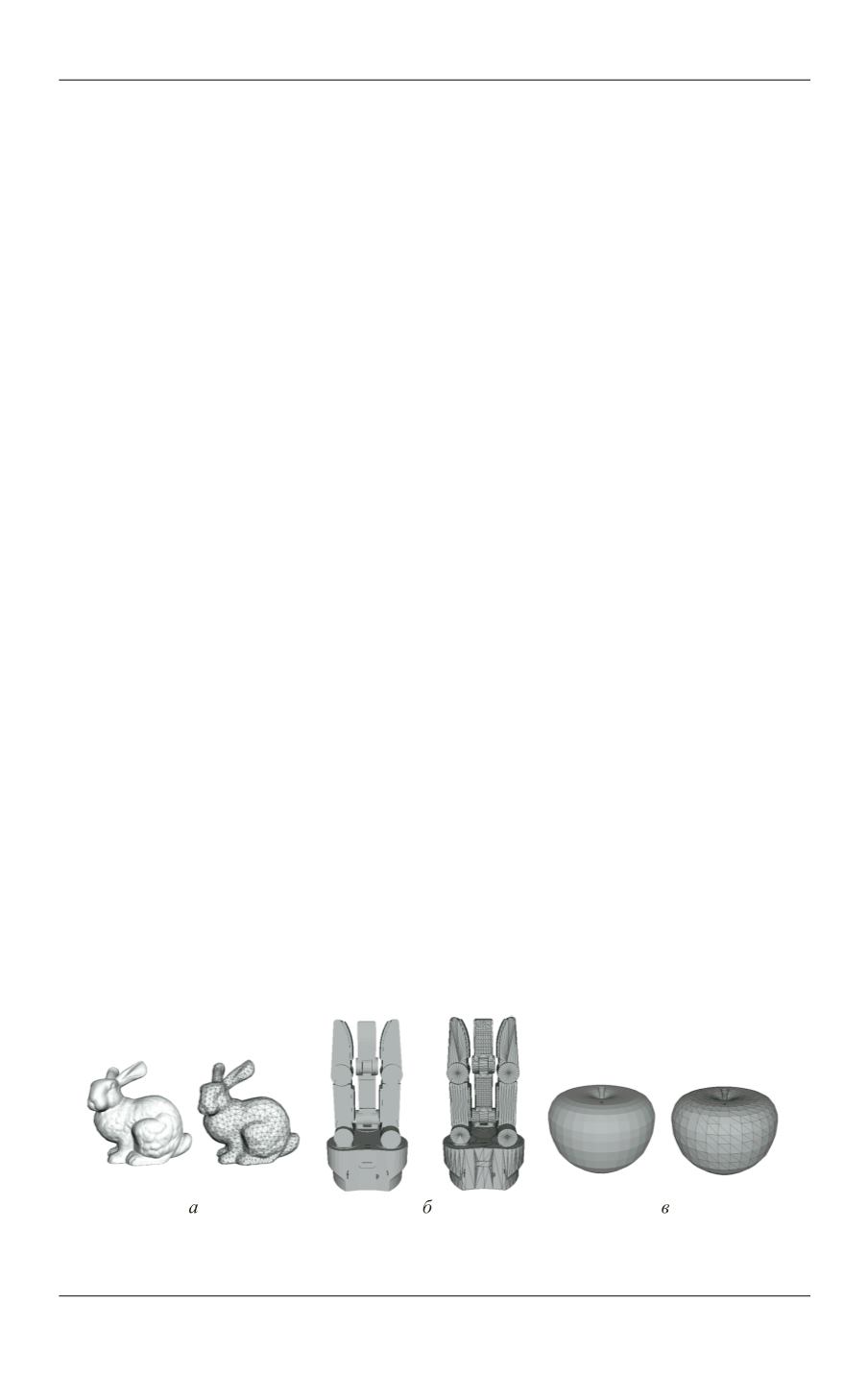
Методы и алгоритмы обнаружения пересечения объектов.
При решении
задачи обнаружения пересечения поверхности ЗУМ и ОМ представляются в
виде многогранников (полигональных моделей). Полигональные модели зада-
ются наборами вершин многогранников и соединяющих их ребер (рис. 1,
а
,
в
).
Захватное устройство представляется в виде набора полигональных моделей,
каждая из которых соответствует одному элементу разветвленной кинематиче-
ской цепи схвата (рис. 1,
б
).
Рис. 1.
Полигональные модели ОМ (
а
,
в
) и захватного устройства Schunk SDH (
б
)