














 3 / 18
3 / 18

Расчет областей пересечения поверхностей захватных устройств манипуляторов…
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 6
99
Сложность детектирования пересечений ЗУМ и ОМ при полигональном
моделировании заключается в том, что для обеспечения приемлемой точности
необходимо вводить в рассмотрение подробные модели поверхностей объектов.
Точность моделирования поверхности объекта тем выше, чем больше входящих
в модель полигонов. Следовательно, для расчета пересечений в приемлемое
время потребуются значительные вычислительные ресурсы, пропорциональные
числу полигонов и вершин моделей. Необходимый компромисс между точно-
стью и временем вычислений можно найти, учитывая следующий факт.
При выполнении захвата в начальный момент времени контакт между зве-
ньями ЗУМ и ОМ отсутствует — между ними имеется зазор. В процессе смыка-
ния пальцев ЗУМ зазор постепенно уменьшается, затем происходит пересече-
ние поверхностей ЗУМ и ОМ и объект захватывается. Исходя из этого, можно
снизить ресурсоемкость вычислений при достаточной точности путем разбие-
ния процедуры обнаружения пересечений на две фазы. В первой фазе модели-
рования захвата можно использовать «грубые» и менее ресурсоемкие методы
обнаружения пересечения. В этой фазе просто устанавливается факт столкнове-
ния ЗУМ и ОМ. Более точные методы расчета пересечения поверхностей ЗУМ
и ОМ применяются во второй фазе операции — после обнаружения пересече-
ния ЗУМ и ОМ в первой фазе. В литературе эти этапы получили названия ши-
рокой (быстрая и грубая оценка) и узкой (более медленная и точная) фаз обна-
ружения столкновений [4].
Анализ существующих методов и алгоритмов широкой фазы.
Наиболее часто
используемыми алгоритмами широкой фазы обнаружения пересечений являются
методы ограничивающих объемов (ОО) — в виде сферы и параллелепипедов.
В методе ОО элементы конструкции ЗУМ и ОМ полагаются помещенными
внутрь других фигур, имеющих более простую форму. Расчет расстояний между
ограничивающими объемами ЗУМ и ОМ требует значительно меньших затрат
времени. Потеря точности компенсируется при реализации узкой фазы расчета
захвата.
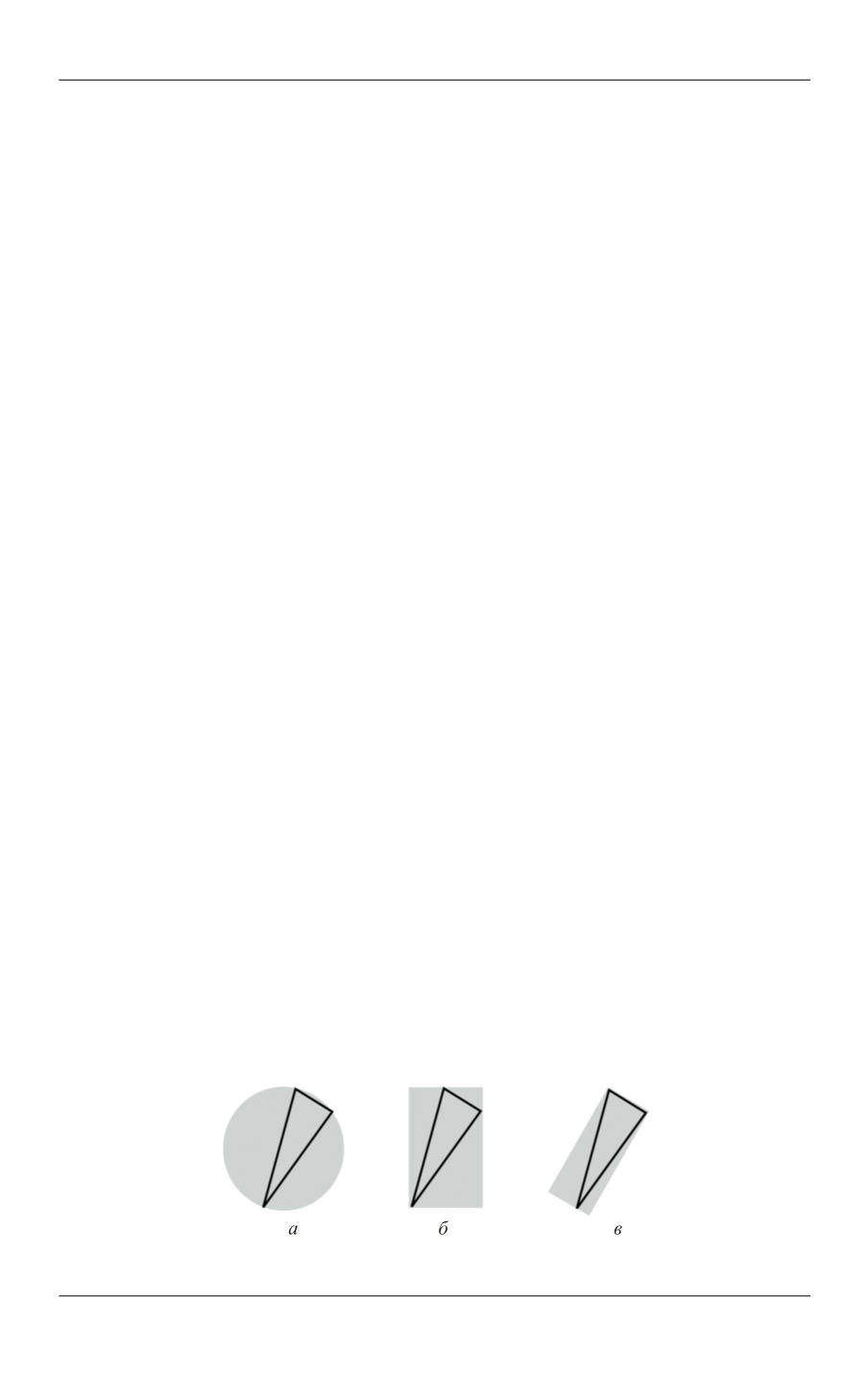
Использование в качестве ОО сферы является самым простым, быстрым, но
и самым грубым приемом обнаружения столкновений (рис. 2,
а
). Фигура в виде
параллелепипеда более точно, чем сфера, повторяет форму объектов. При этом
проверка на пересечение с использованием в качестве ОО параллелепипедов
(ОП) выполняется также, как и в случае сферы, достаточно быстро. Поэтому
ОП наиболее часто используют для проверки на наличие пересечения.
Рис. 2.
Ограничивающие объемы