















 4 / 9
4 / 9

где силовая функция определена в следующей форме:
Ω =
1
−
μ
r
0
+
μ
r
1
+
1
2
(
x
2
+
y
2
)
−
1
2
ez
2
cos
υ, r
2
0
= (
x
+
μ
)
2
+
y
2
+
z
2
,
r
2
1
= (
x
−
1 +
μ
)
2
+
y
2
+
z
2
.
Ограниченная эллиптическая задача трех тел не имеет интегра-
ла энергии, который обычно заменяется его приближением, а имен-
но функцией Якоби в представлении, предложенном Маршалом [9] и
определяемом как
(
x, y, z, V
x
, V
y
, V
z
) =
=
μ
(
μ
+
x
−
1)
2
+
2
p
(
μ
+
x
−
1)
2
+
y
2
+
z
2
+
y
2
+
z
2
!
+
+ (1
−
μ
)
(
μ
+
x
)
2
+
2
p
(
μ
+
x
)
2
+
y
2
+
z
2
+
y
2
+
z
2
!
−
−
(
e
cos
υ
+ 1)
V
2
x
+
V
2
y
+
V
2
z
+
z
2
,
(2)
где
V
x
, V
y
, V
z
— скорости движения пассивно гравитирующей ма-
териальной точки (КА). В общем случае, как следует из (2), третье
слагаемое зависит от положения материальной точки на оси аппликат.
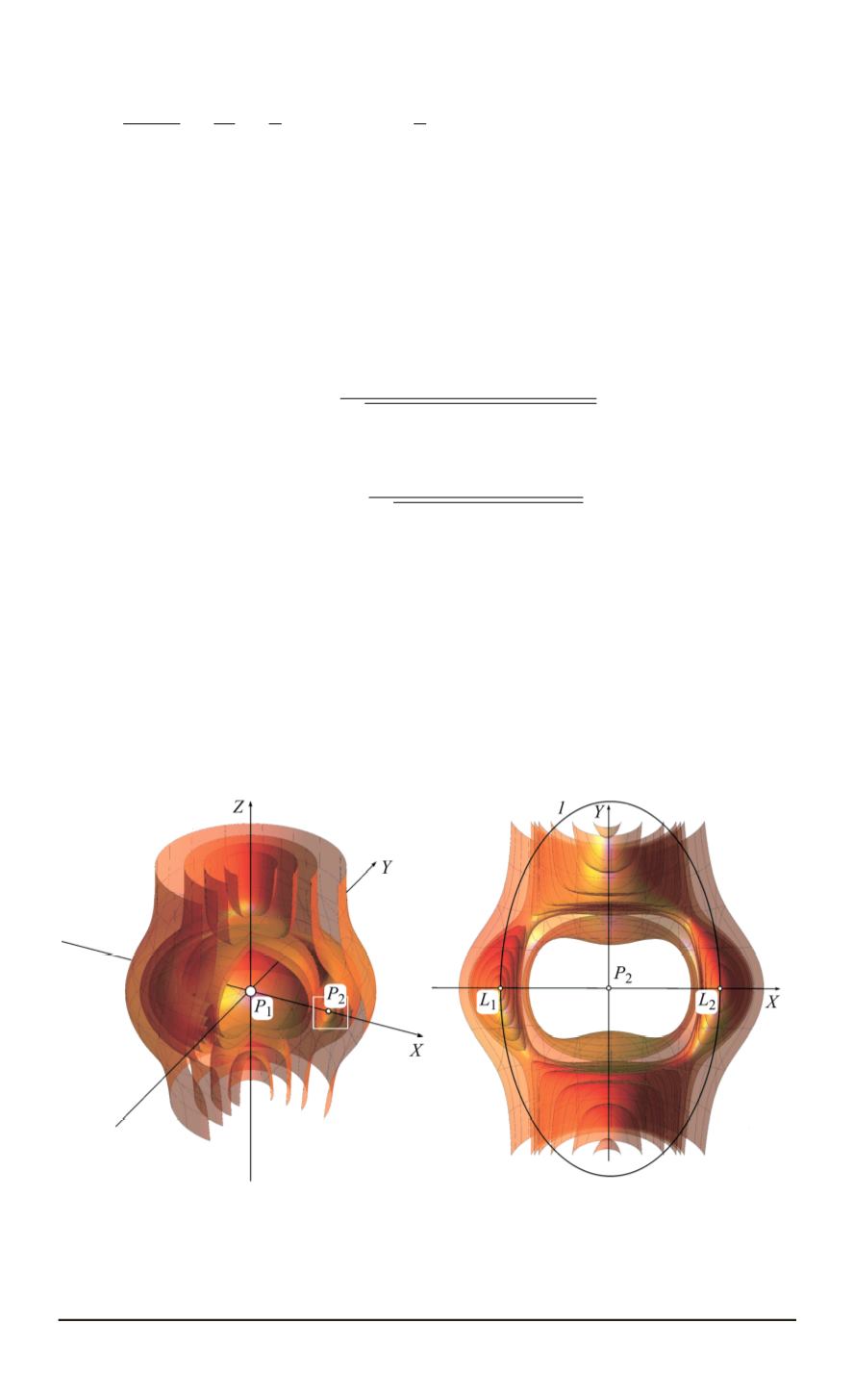
На рис. 1 приведен графический образ функции Якоби для раз-
личных значений интеграла энергии при фиксированном значении ис-
тинной аномалии меньшего тела. Характерной особенностью пред-
Рис. 1. Структура энергетических поверхностей, определяемых функцией
Якоби:
P
1
и
P
2
— большее и меньшее притягивающие тела,
L
1
и
L
2
— коллинеарные точки
либрации,
1
— F-орбита
24 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 6