














 13 / 18
13 / 18

вания:
ψ
θ
γ
=
0
,
7
0
,
7
0
,
7
рад
,
что соответствует приведенным далее значениям фазовых координат
λ
0
λ
1
λ
2
λ
3
=
0
,
7886
0
,
413
0
,
413
0
,
1921
.
Поставим задачу перевода КА из заданной ориентации в конечную
λ
0
= 1
,
λ
1
=
λ
2
=
λ
3
= 0
за время
t
к
−
t
0
= 10
с. В качестве начальных
оценок
ˆ
ω
примем значения
ω
x
= 0
,
01
рад/с,
ω
y
=
ω
z
=
−
0
,
01
c
−
1
.
Для получения максимальной скорости сходимости оценки угло-
вой скорости
ˆ
ω
значения всех полюсов
f
11
, f
12
, f
13
, f
04
, f
01
, f
02
, f
03
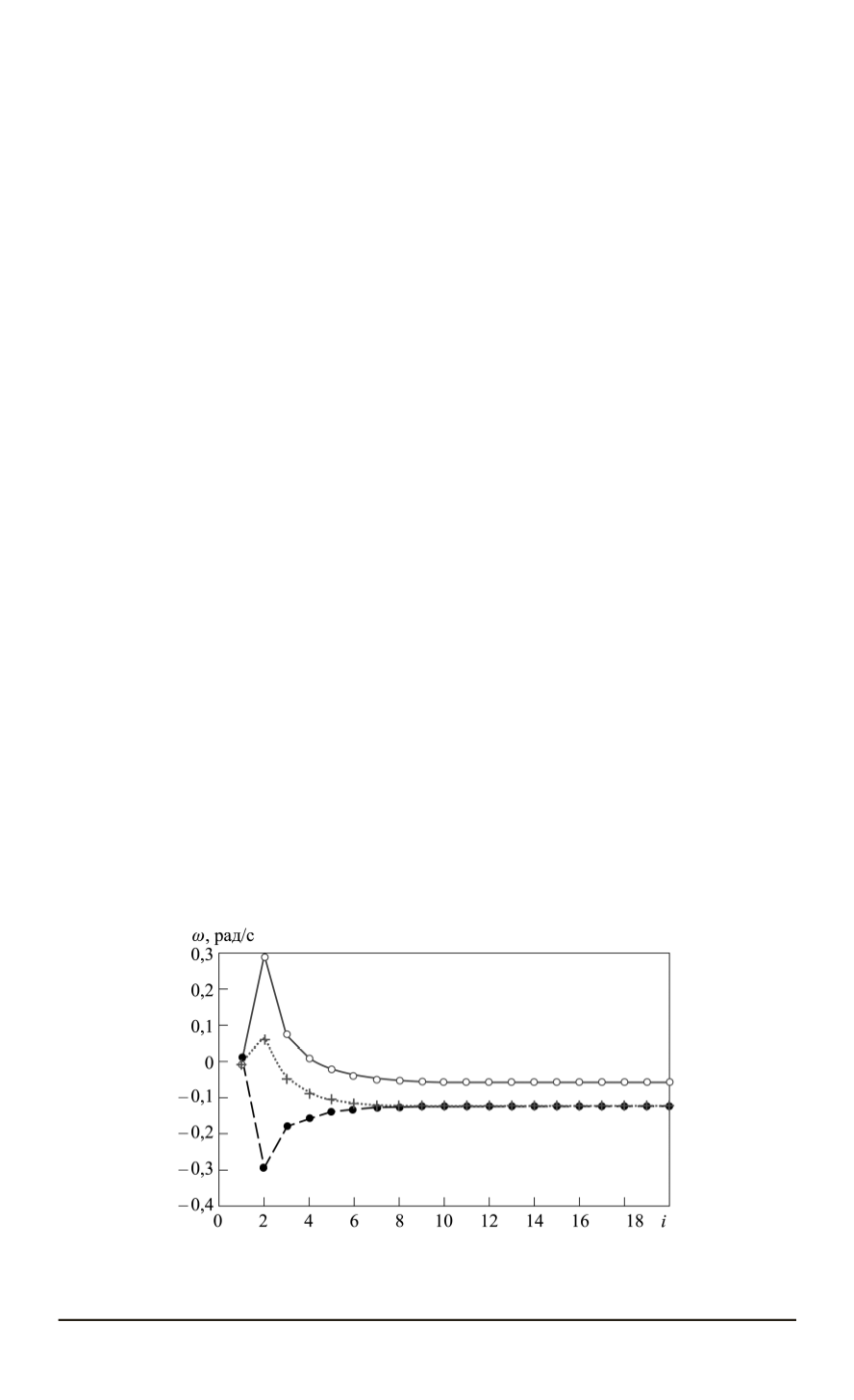
примем равными нулю. В этом случае, как показали результаты моде-
лирования, все компоненты угловой скорости вращения КА за восемь
итераций (
i
= 8
) практически сходятся к установившимся (постоян-
ным) значениям. Графики значений оценок
ˆ
ω
и величин промаха ком-
понент кватерниона переориентации на каждом такте представлены
на рис. 1 и 2.
Также было проведено моделирование с различными значениями
угловых рассогласований и времени переориентации. Угловое рассо-
гласование задавалось одинаковым по всем углам. Результаты моде-
лирования, представленные в таблице, показали, что число итераций
при самых неблагоприятных условиях не превышает десяти (
i
= 10
).
Таким образом, за один такт работы бортовой вычислительной ма-
шины в зависимости от поступления новой информации об угловом
Рис. 1. График изменения оценок вектора угловой скорости от числа итераций:
—
•
— —
ω
x
; — — —
ω
y
; —
◦
— —
ω
z
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 6 15