














 4 / 21
4 / 21

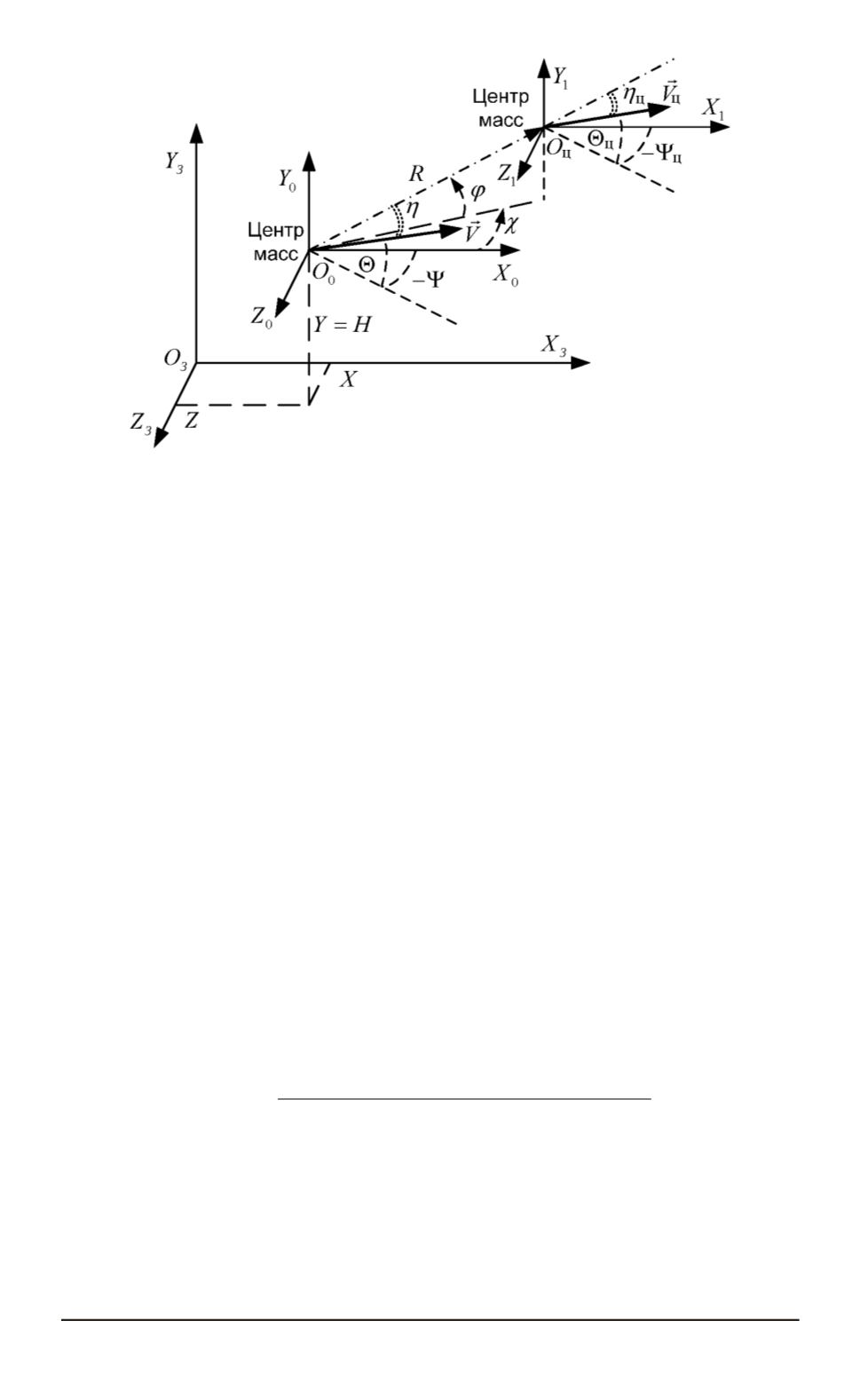
Рис. 3. Вектор состояния ЛА
(
V,
Θ
,
Ψ
, X, Y, Z
)
относительно местной географи-
ческой СК (
R, ϕ, χ
)
КСУ имеет при
V
=
const вид системы дифференциальных уравне-
ний:
˙Θ = (
j
П
HY
−
g
cos Θ)
/V
;
˙Ψ =
−
j
П
HZ
/
(
V
cos Θ);
˙
X
=
V
cos Θ cos Ψ;
˙
Y
=
V
sin Θ;
˙
Z
=
−
V
cos Θ sin Ψ
,
(1)
которая при малых углах
Ψ
(или
Θ
) декомпозируется на модели ка-
налов СУ ЛА — горизонтальный (или вертикальный) с управлениями
j
н
Z
(
j
н
Y
). Поэтому общую модель ЛА КСУ можно считать двухканаль-
ной с перекрестными кинематическими связями [[1]] (см. рис. 3), где
j
П
н
Y
=
j
н
Y
0
+
j
н
Y
,
j
П
н
Z
=
j
н
Z
0
+
j
н
Z
, причем решение системы при
j
н
Y
0
,
j
н
Z
0
дает
Θ
0
(
t
)
,
Ψ
0
(
t
)
(или, наоборот, заданные
Θ
0
,
Ψ
0
формируют
j
н
Y
0
,
j
н
Z
0
).
Текущее расстояние
k
O
0
O
ц
k
R
=
q
(
X
−
X
ц
)
2
+ (
Y
−
Y
ц
)
2
+ (
Z
−
Z
ц
)
2
.
(2)
При применении сферической системы координат, особенно полез-
ной при исследовании конфликтной ситуации в системе ЛА с центра-
ми масс в точках
O
0
и
O
ц
(см. рис. 3) в системе координат с началом
отсчета в точке
O
0
, полные уравнения пространственной кинематики
16 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 4