














 3 / 21
3 / 21

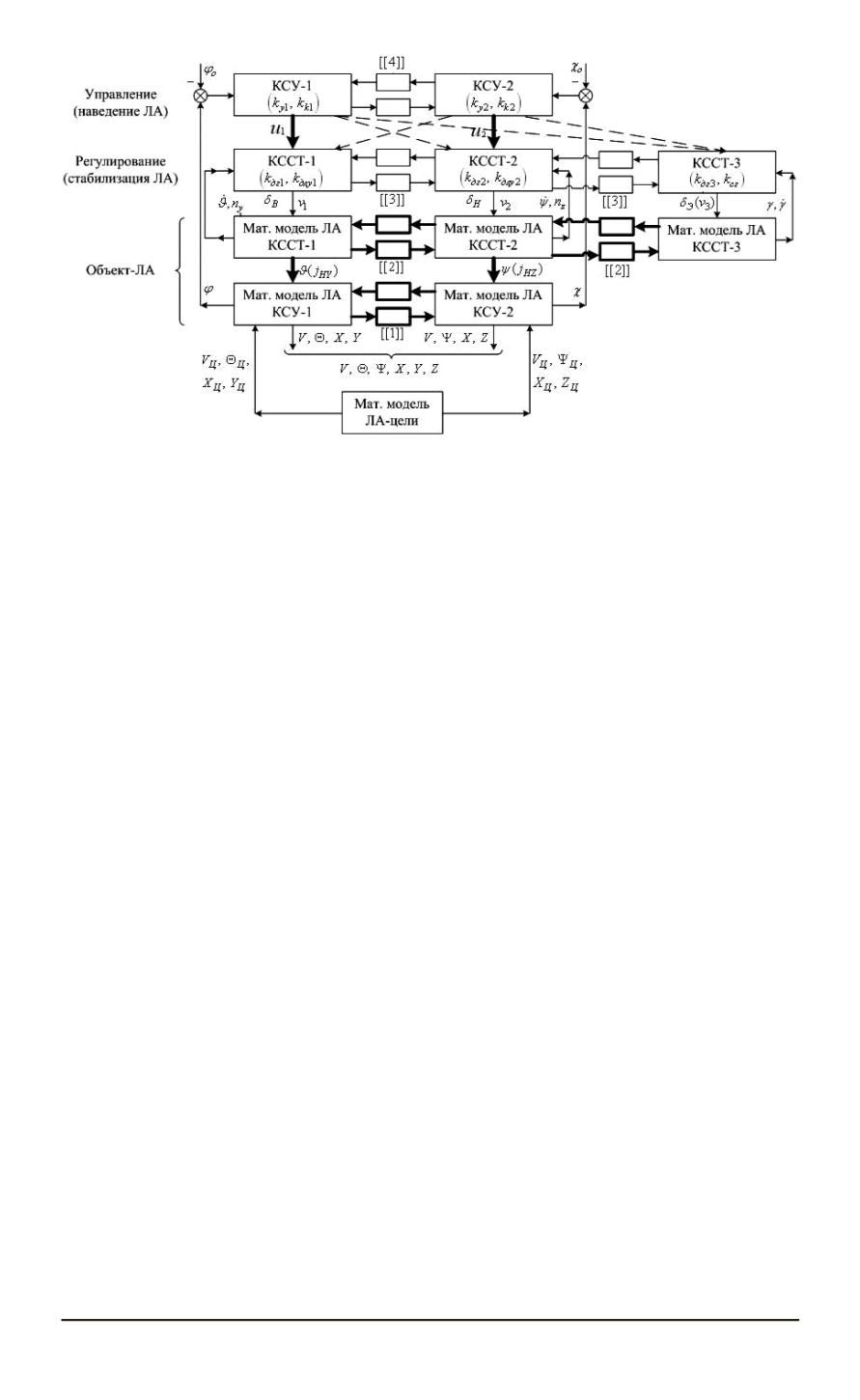
Рис. 2. Двухуровневая модель наведения–стабилизации трехканальной СУ ЛА
ЛА (центра масс
O
ц
ЛА-цели);
V,
Θ
,
Ψ(
V
ц
,
Θ
ц
,
Ψ
ц
)
— координаты век-
тора скорости ЛА (ЛА-цели);
ϕ
— угол места между горизонтальной
плоскостью
X
0
O
0
Z
0
и линией визирования;
χ
— угол азимута между
осью
O
0
X
0
и проекцией линии визирования на
X
0
O
0
Z
0
;
R
— длина
вектора
−−−→
O
0
O
ц
;
ϕ
0
, χ
0
, . . .
— элементы опорной траектории.
Следует иметь в виду, что в линеаризованном варианте предста-
вленной модели вектор состояния центра масс (
V
,
Θ
,
Ψ
) заменяется
на вектор (
Δ
V
,
ΔΘ
,
ΔΨ
), где данные динамические параметры есть
отклонения ЛА от опорного движения (
V
0
,
Θ
0
,
Ψ
0
). Блоки с обозна-
чением [[
i
]],
i
= 1 : 4
, являются перекрестными связями в динамике
поступательного движения центра масс ЛА, углового (вращательного)
движения вокруг центра масс ЛА, между регуляторами ССт и в методе
пространственного наведения ЛА. В типичной ситуации существен-
на связь между каналами вращательного и поступательного движений
ЛА, что определяет связь каналов стабилизации и наведения соответ-
ственно [8].
Математическая модель движения ЛА представлена моделью угло-
вого (вращательного) движения вокруг центра масс по углам тангажа
ϑ
и рыскания
ψ
(далее — с расширением по углу крена
γ
) с соответствую-
щими воздействиями аэродинамического управления по нормальному
ускорению (
j
Н
) в каналах управления направлением скорости центра
масс в вертикальной плоскости по углу наклона траектории (
Θ
) и в
горизонтальной плоскости по углу поворота траектории (
Ψ
) (рис. 3).
На рис. 3 введены следующие дополнительные обозначения:
η
— угол
упреждения;
η
Ц
— курсовой угол цели.
Как известно [8], в общем случае система динамических и кинема-
тических связей двухканальной математической модели ЛА на уровне
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 4 15