СИСТЕМЫ УПРАВЛЕНИЯ
УДК 629.7.054 (082)
М. О. Т о р о п о в
ВЫБОР ЧАСТОТЫ УПРАВЛЕНИЯ ЦИФРОВЫМ
СЕРВОПРИВОДОМ ЛЕТАТЕЛЬНОГО АППАРАТА
Исследована схема цифрового управления сервоприводом высоко-
маневренного летательного аппарата. Приведена формула, позво-
ляющая выбрать частоту управления с учетом запаздывания в
алгоритме управления сервоприводом.
Анализ перспектив развитияэлектродистанционных систем упра-
влениясамолетами показывает, что в ближайшие 10–15 лет в качестве
рулевых приводов таких систем будут применяться в основном элек-
трогидравлические следящие приводы. Они превосходят электриче-
ские приводы по таким показателям, как мощность на единицу массы;
приведенный момент инерции к двигателю при одинаковой массе объ-
екта у гидропривода в 20–50 раз меньше, чем у электропривода [1].
Электрогидравлические приводы — это исполнительные серво-
приводы САУ высокоманевренных подвижных объектов, к которым
предъявляется ряд требований: отработка управляющего сигнала с
погрешностью не выше
ε
зад
; отсутствие автоколебаний; обеспечение
желаемых частотных характеристик, особенно в области малых и
сверхмалых перемещений выходного звена привода — при амплиту-
дах порядка 0,1 % максимального хода; отсутствие перерегулирования;
полоса пропусканияпо уровню минус 6 дб. . . (10–12) Гц.
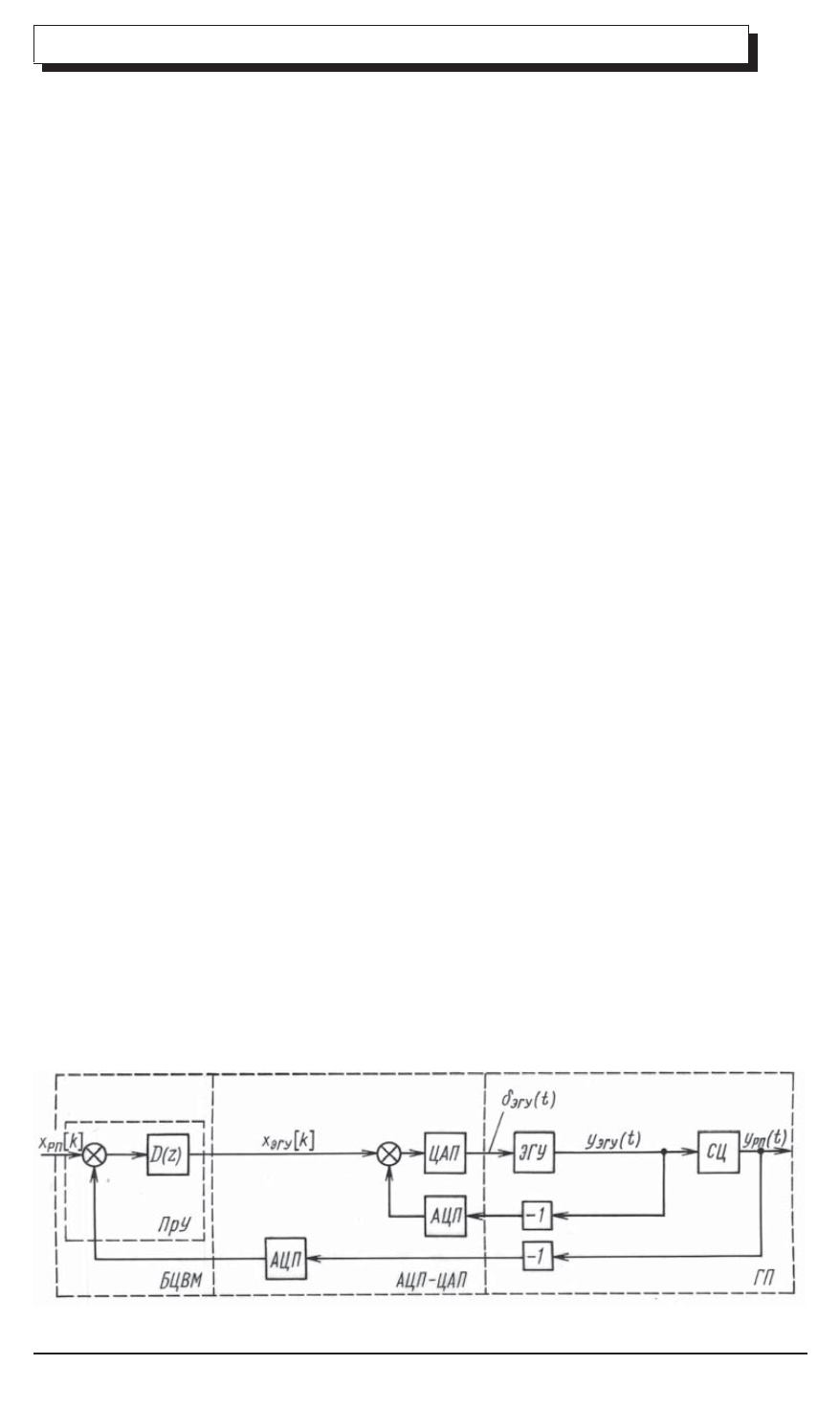
Гидропривод можно представить как систему, состоящую из двух
позиционных контуров (рис. 1). По расположению относительно друг
друга обозначим контур золотника – "внутренним", или контуром ЭГУ,
а контур рулевого привода (РП) — “внешним” контуром.
Рис. 1. Структура цифровой схемы управления
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2005. № 4 47


