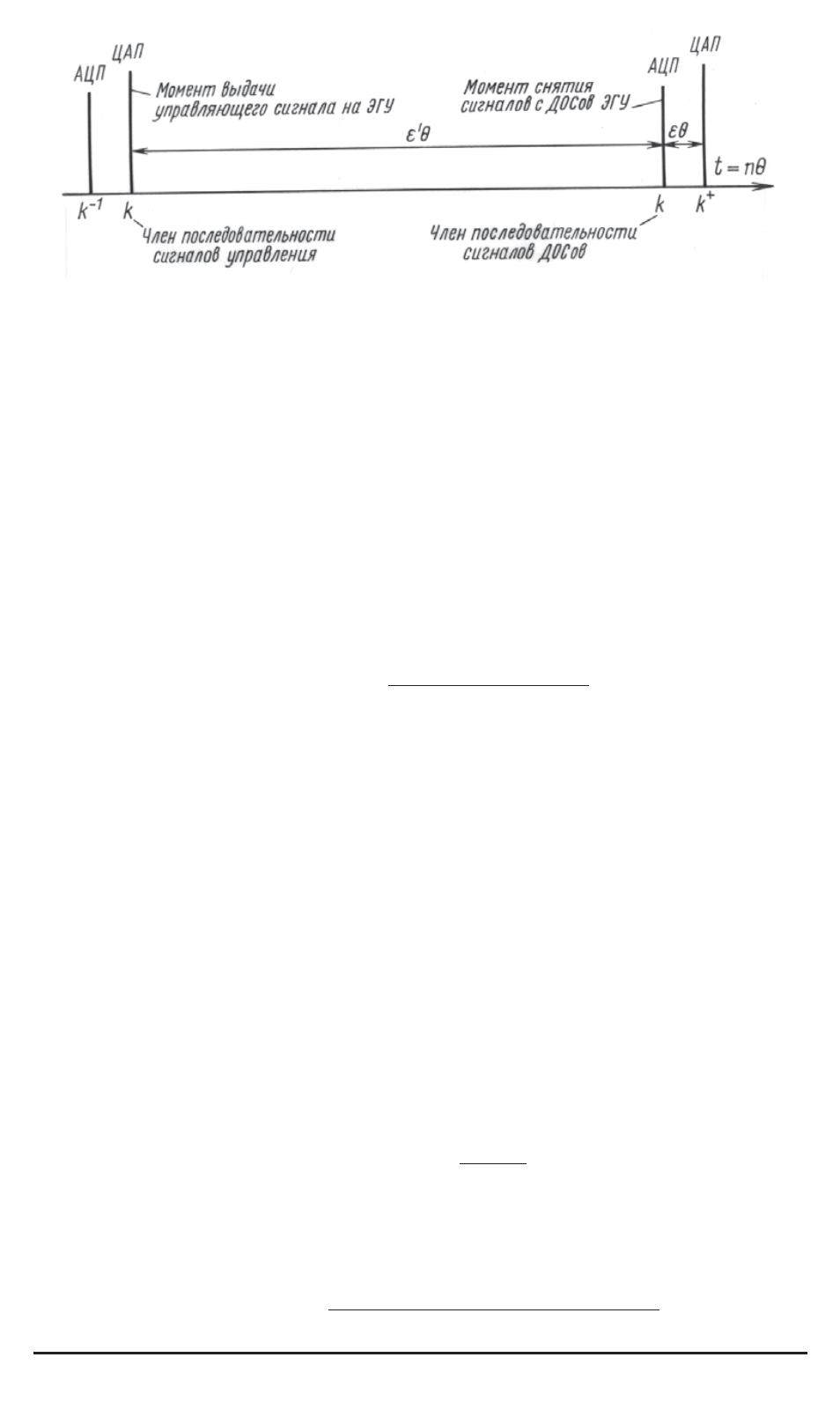
Рис. 4. Временн´ая диаграмма управления ЭГУ
Умножаяобе части на
z
−
k
и суммируяпо
k
в диапазоне от 0 до
∞
,
получаем следующее выражение:
∞
k
=0
δ
ЭГУ
[
k
] =
∞
k
=0
x
ЭГУ
[
k
]
−
∞
k
=0
y
ЭГУ
[
k
−
1
, ε
]
.
Переходяк
Z
-преобразованию, имеем
Δ
ЭГУ
(
z,
0) =
X
ЭГУ
(
z,
0)
−
z
−
1
Y
ЭГУ
(
z, ε
)
.
Замкнутаяпередаточнаяфункцияконтура ЭГУ имеет вид
Φ
ЭГУ
(
z,
0) =
W
ЭГУ
(
z,
0)
1 +
z
−
1
W
ЭГУ
(
z, ε
)
.
(1)
Наличие в знаменателе множителя
z
−
1
при
W
(
z, ε
)
обусловлено
использованием в цифровом сумматоре предшествующего значения
сигнала ДОС РП, к тому же смещенного на
ε θ
, что ведет к появлению
в знаменателе смещенной передаточной функции
W
(
z, ε
)
.
На динамику привода влияет также временная задержка
η
=
= (1
−
ε
)
θ
=
εθ
между снятием сигнала с ДОС и выдачей управляю-
щего сигнала на ЭГУ. Появление
η
связано с программной задержкой
в обработке сигнала, котораяв ЦСП может быть уменьшена, но не
сведена к нулю. Очевидно, что величина
η
зависит от частоты работы
системы опроса АЦП–ЦАП, быстродействияБЦВМ и оптимизации
алгоритма управления.
Несмещеннаяразомкнутаяпередаточнаяфункция
W
ЭГУ
(
z,
0)
имеет
вид
W
ЭГУ
(
z,
0) =
Q
ЭГУ
θ
z
−
1
;
(2)
смещенную передаточную функцию разомкнутой системы
W
ЭГУ
(
z, ε
)
можно представить как
W
ЭГУ
(
z, ε
) =
Q
ЭГУ
θε z
+ (
Q
ЭГУ
θ
−
Q
ЭГУ
θε
)
z
−
1
.
(3)
50 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2005. № 4


