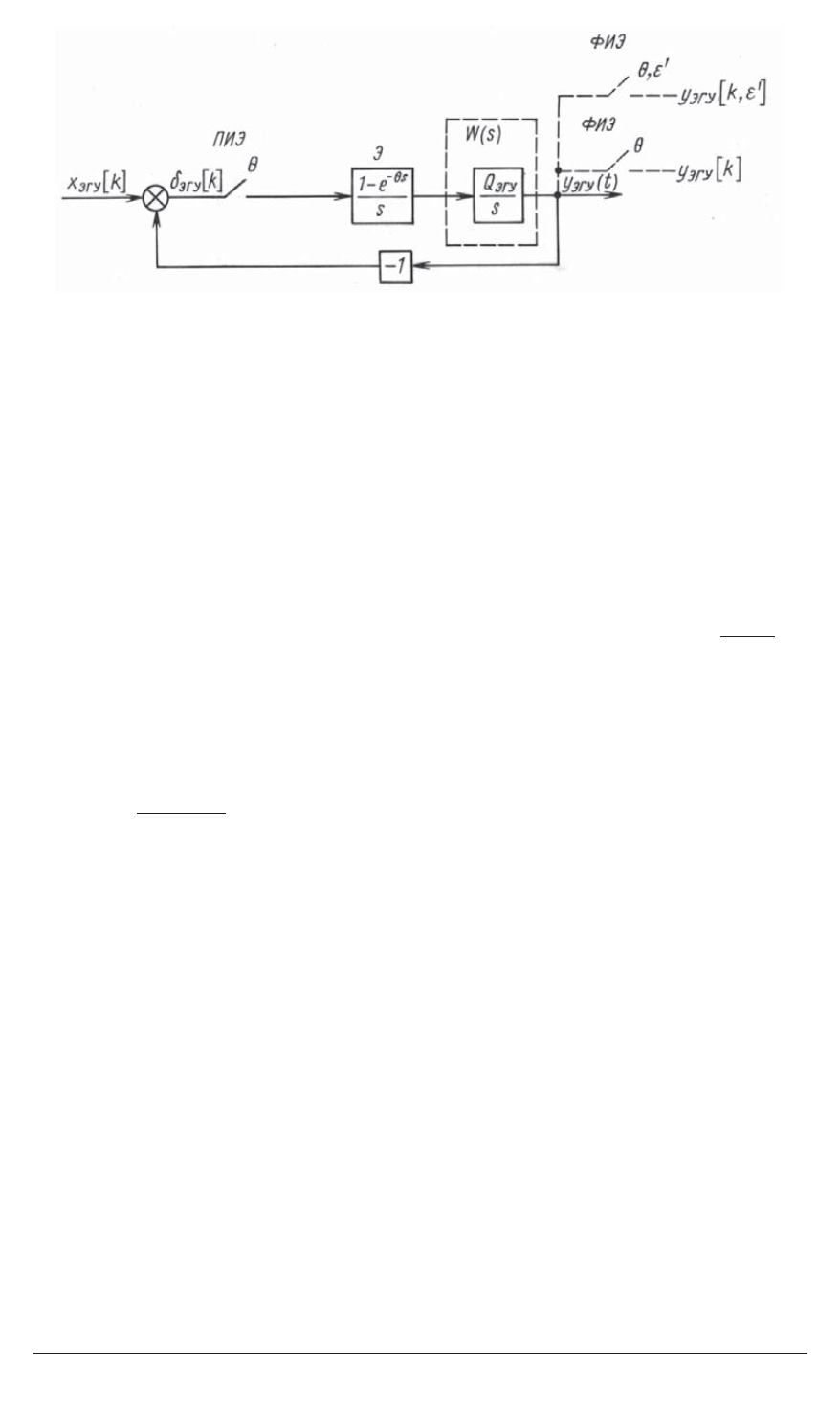
Рис. 3. Математическая модель контура ЭГУ ЦСП
дели контура ЭГУ, в которой в предположении малости массы прене-
брегаем инерционностью электромагнитного преобразователя(ЭМП)
ЭГУ. Фиктивный импульсный элемент (ФИЭ) введен дляматемати-
ческого описаниясигнала рассогласования. Он имеет тот же период
работы, что и реальный импульсный элемент, но моменты его замы-
каниясмещены на величину
ε θ
относительно моментов замыкания
реального элемента. Даннаясхема управленияможет быть описана
теорией несинфазных импульсных элементов.
На рис. 3 введены следующие обозначения:
W
ЭГУ
(
s
) =
Q
ЭГУ
s
—
передаточнаяфункциянепрерывной части контура ЭГУ при усло-
вии пренебреженияинерционностью ЭМП; ПИЭ — простейший им-
пульсный элемент, генерирующий решетчатую функцию с периодом
θ
; Э — экстраполятор (нулевого порядка) с передаточной функцией
W
ф
(
s
) =
1
−
e
−
θs
s
;
Q
ЭГУ
— добротность “внутреннего” контура;
x
ЭГУ
[
k
]
— дискретный управляющий сигнал;
y
ЭГУ
[
k
]
— дискретный сигнал с
ЭГУ, полученный с помощью фиктивного ПИЭ;
y
ЭГУ
[
k, ε
]
— дискрет-
ный сигнал с ЭГУ, полученный с помощью фиктивного ПИЭ, смещен-
ного на величину
ε θ
;
δ
ЭГУ
[
k
]
— дискретный сигнал рассогласования.
Дискретный сигнал
х
ЭГУ
[
k
]
, сформированный по закону управле-
ния
D
(
z
)
, поступает на сумматор “внутреннего” контура, реализован-
ный в БЦВМ. На цифровом сумматоре происходит вычисление дис-
кретного сигнала рассогласования
δ
ЭГУ
[
k
]
, который, в свою очередь,
поступает на формирующее устройство и далее на непрерывную часть
контура ЭГУ.
Временн´аядиаграмма работы ЦСП изображена на рис. 4. Из ри-
сунка видно, что при формировании
k
-го сигнала управленияисполь-
зуется(
k
−
1
)-й сигнал ДОС ЭГУ, поэтому для
k
-го момента времени
справедлива формула
δ
ЭГУ
[
k
] =
x
ЭГУ
[
k
]
−
y
ЭГУ
[
k
−
1
, ε
]
.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2005. № 4 49


