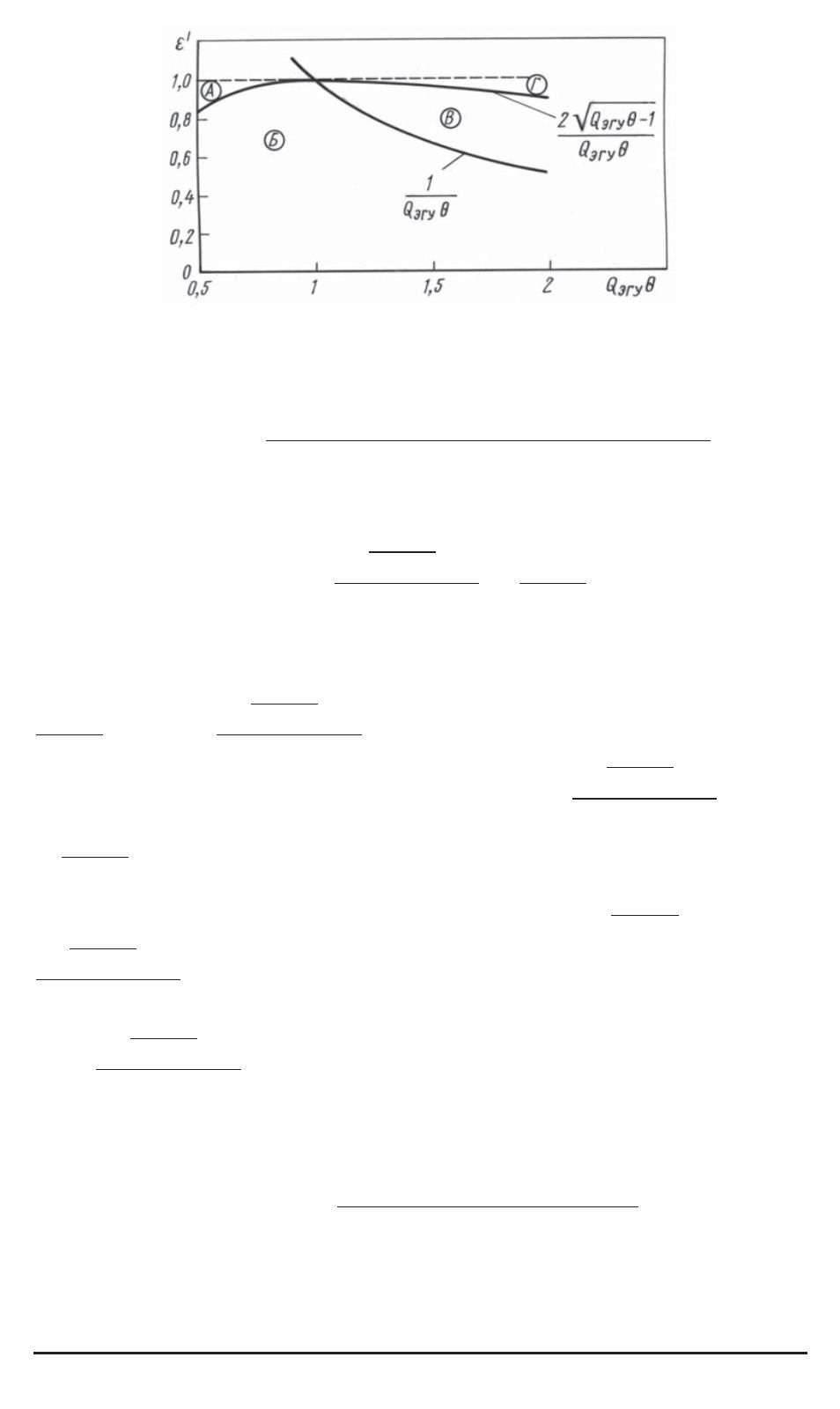
Рис. 5. Плоскость
{
Q
ЭГУ
θ, ε
}
Тогда из уравнения(1) с учетом функций (2) и (3) получим
Φ
ЭГУ
(
z,
0) =
Q
ЭГУ
θz
z
2
−
(1
−
Q
ЭГУ
θε
)
z
+ (
Q
ЭГу
θ
−
Q
ЭГУ
θε
)
.
(4)
Пусть в качестве координат выбрано произведение
Q
ЭГУ
θ
и
ε
.
Плоскость
{
Q
ЭГУ
θ, ε
}
можно разбить на 4 подобласти, которые опре-
деляют графики функций
2
√
Q
ЭГУ
θ
−
1
Q
ЭГУ
θ
и
1
Q
ЭГУ
θ
, причем от того, в
какой из них расположен параметр
ε
, зависит последующий анализ.
На рис. 5 изображены следующие подобласти:
— подобласть А ограничена сверху условием
ε
≤
1
и функцией
1
Q
ЭГУ
θ
, снизу —
2
√
Q
ЭГУ
θ
−
1
Q
ЭГУ
θ
;
— подобласть Б ограничена слева функцией
2
√
Q
ЭГУ
θ
−
1
Q
ЭГУ
θ
, справа
—
1
Q
ЭГУ
θ
;
— подобласть В слева ограничена функцией
1
Q
ЭГУ
θ
, сверху —
2
√
Q
ЭГУ
θ
−
1
Q
ЭГУ
θ
;
— подобласть Г сверху ограничена условием
ε
≤
1
, снизу — функ-
цией
2
√
Q
ЭГУ
θ
−
1
Q
ЭГУ
θ
.
В результате анализа подобласти Б выявили, что правая часть фор-
мулы (4) может быть представлена в виде
Φ
ЭГУ
(
z,
0) =
K
Ω
ze
−
γθ
sin(Ω
θ
)
z
2
−
2
ze
−
γθ
cos(Ω
θ
) +
e
−
2
γθ
;
переходнаяфункциясистемы как
У
ЭГУ
(
t
) = 1
−
e
−
γt
(cos Ω
t
−
λ
sin Ω
t
)
,
(5)
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2005. № 4 51


