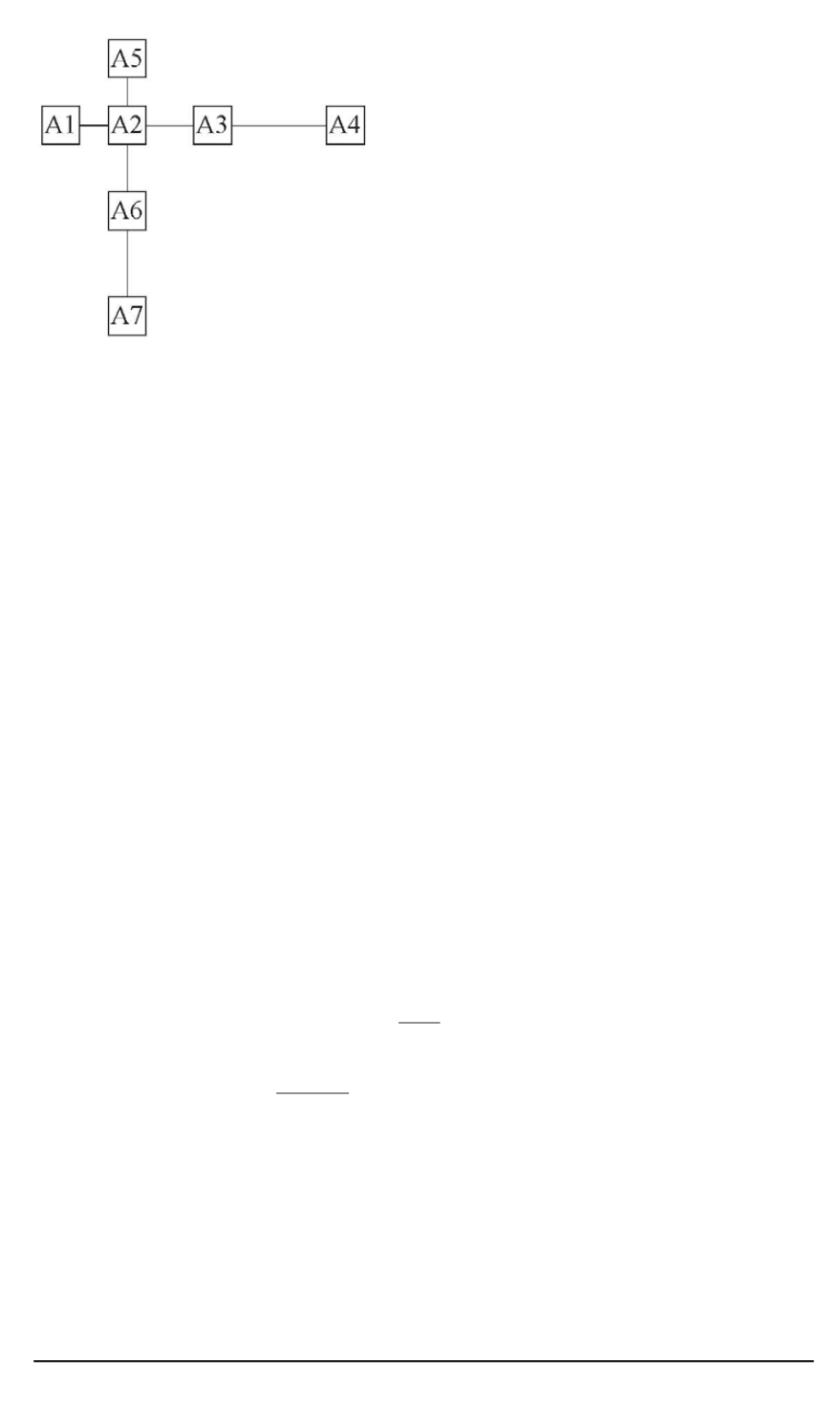
Рис. 1. Расположение приемных
элементов в антенной решетке
минимуму влияние подобных меша-
ющих факторов, можно увеличением
базы пеленгатора, что, как будет по-
казано далее, приводит к уменьше-
нию интервала отсчетов пеленгацион-
ной характеристики.
Используя антенную решетку,
имеющую несколько различных баз,
можно повысить точность рабо-
ты системы пеленгации, обеспечив
при этом однозначность определе-
ния углов в достаточном диапазоне.
Для обработки сигналов в антенной
решетке предлагается использовать рассмотренный далее итерацион-
ный алгоритм. Рассмотрим функционирование высокоточного гидро-
акустического пеленгатора, имеющего в своем составе плоскостную
прореженную антенную решетку, схематично изображенную на рис. 1.
Приемные элементы расположены в двух взаимно перпендикуляр-
ных плоскостях. Расстояние между приемными элементами:
A1
−
A2
и
A5
−
A2
d/λ
= 0
,
5;
A2
−
A3
и
A2
−
A6
d/λ
= 2;
A2
−
A4
и
A2
−
A7
d/λ
= 8
,
где
d
— база пеленгатора (расстояние между антеннами);
λ
— длина
волны несущей частоты сигнала.
Для обоснования алгоритма работы гидроакустической пеленгаци-
онной системы рассмотрим работу одной пары приемных элементов
(А1 и А2).
Разница фаз сигналов на выходах приемников будет равна
Δ
ϕ
21
=
2
πd
λ
sin(Ω
21
)
,
откуда
Ω
21
= arcsin
Δ
ϕ
21
λ
2
πd
, где
Ω
21
– угол пеленга источника излу-
чения.
Аналогичным образом определяется разница фаз сигналов на вы-
ходах указанных выше пар приемников.
Функциональная схема алгоритма определения угла пеленга для
одной плоскости приведена на рис. 2. Приведенный алгоритм пред-
назначен для обработки гармонических сигналов, подвергнутых дву-
стороннему знаковому преобразованию
s
(
t
) = signum (sin(
ωt
))
(
ω
—
60 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 4


