онных комплексах. В настоящей работе рассматриваются алгоритмы
интегрирования показаний ПНУ с данными цифровых карт.
Ранее указывалось, что данные, полученные из оригинальной кар-
ты, перед их непосредственнымиспользованиемв целях навигации
должны быть преобразованы в топологическую модель. Затем произ-
водится начальное позиционирование пешехода.
На второмэтапе разрабатываются процедуры корректировки коор-
динат маршрута с помощью цифровых карт (map matching).
Последний этап — автоматическое вычисление оптимального
маршрута до заданной точки. Алгоритм прокладывания маршрута
для системавтомобильной навигации с использованиемдорожных БД
является широко известным. Но алгоритм навигации в помещении
имеет ряд существенных отличий по следующим причинам:
— БД зданий и помещений не являются унифицированными и за-
частую плохо совместимы;
— ряд методов автомобильной навигации либо принципиально не-
реализуем(установка датчиков на колесо или на рулевую колонку), ли-
бо сильно ограничен (использование сигналов спутниковых систем);
— у различных категорий пользователей существуют специфиче-
ские требования, например, инвалиды опорно-двигательного аппарата
не могут использовать лестницы, а незрячие — специальный интер-
фейс, отличный от графического.
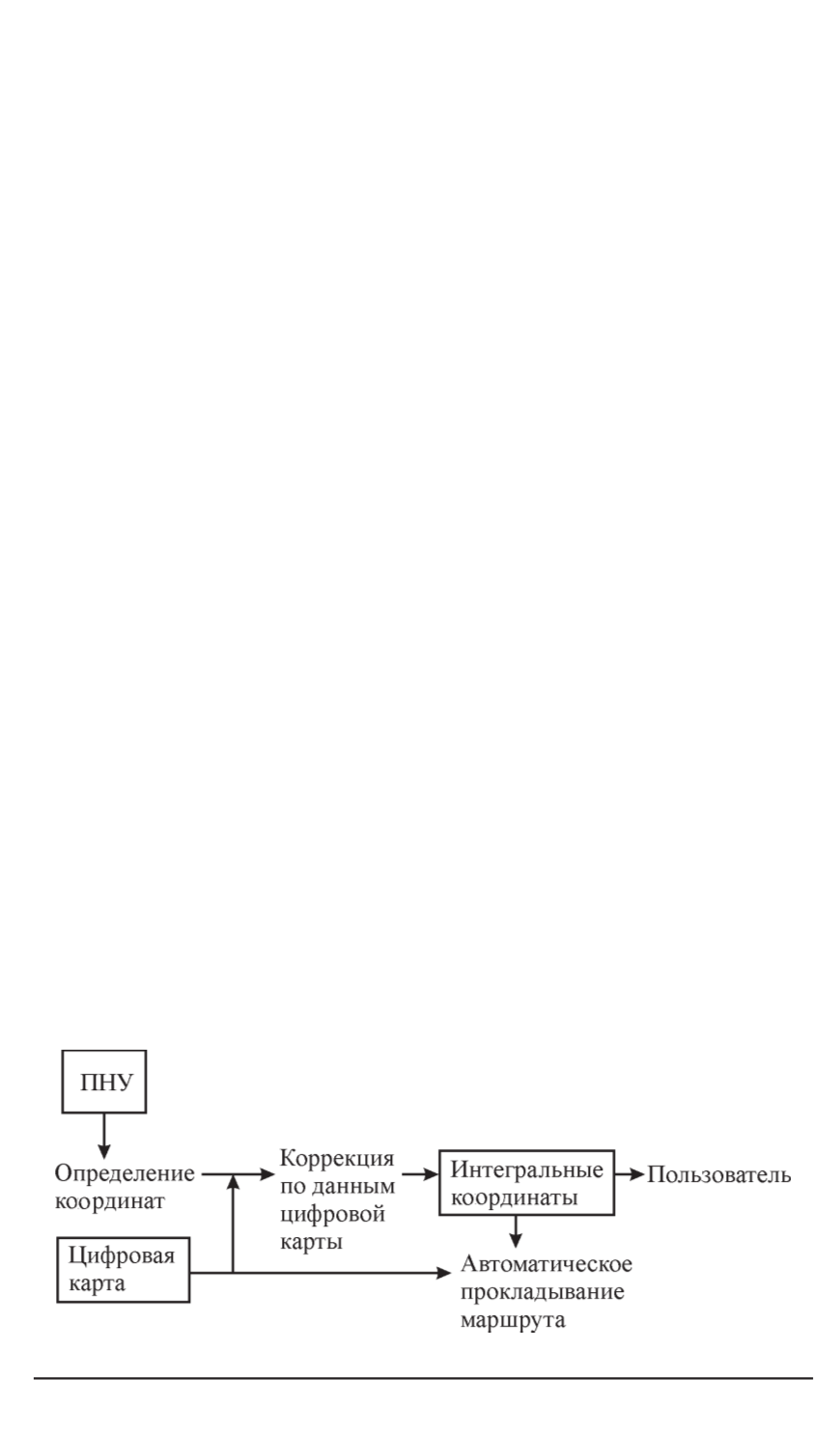
На рис. 2 приведена общая концепция навигации пешехода. На-
вигационная система должна обеспечивать трехмерные координаты
местоположения в течение всего времени функционирования вне зави-
симости от внешних источников коррекции, в том числе по цифровым
картам. Алгоритмкоррекции по цифровымкартампозволяет выделить
из БД узловые точки и линейные участки возможного прохождения
маршрута. Сравнивая показания навигационной системы с выделен-
ными участками, можно существенно повысить точность определения
координат.
Рис. 2. Концепция навигации пешехода
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 3 47


