t
= 1850
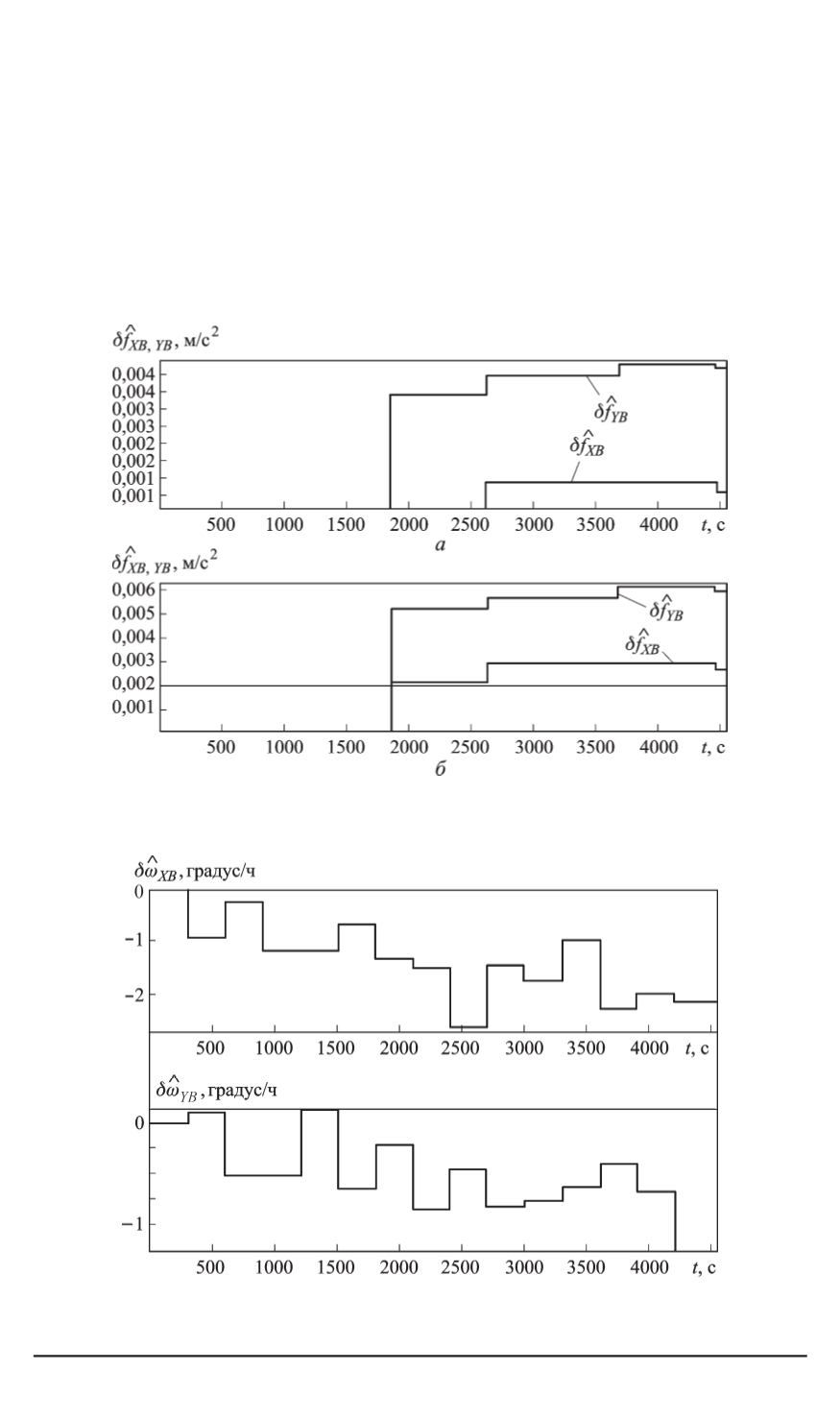
с. Полученные оценки приведены на рис. 4,
а
. Найденные
смещения нуля стольмалы, что не оказывают заметного влияния на
поведение погрешностей автономной ИНС по скорости. Поэтому со-
стоятельностьоценок подтверждаласькосвенно — введением в показа-
ния горизонтальных акселерометров дополнительных погрешностей,
равных
0
,
002
м/с
2
, и повторением процедуры оценивания. Результаты
приведены на рис. 4,
б
.
После компенсации найденных погрешностей было выполнено
оценивание смещений нуля гироскопов непрерывно в течение всего
Рис. 4. Оценки смещений нуля акселерометров (
а
), те же оценкипосле введения
дополнительной погрешности (
б
)
Рис. 5. Оценки смещений нуля гироскопов
76 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 3


