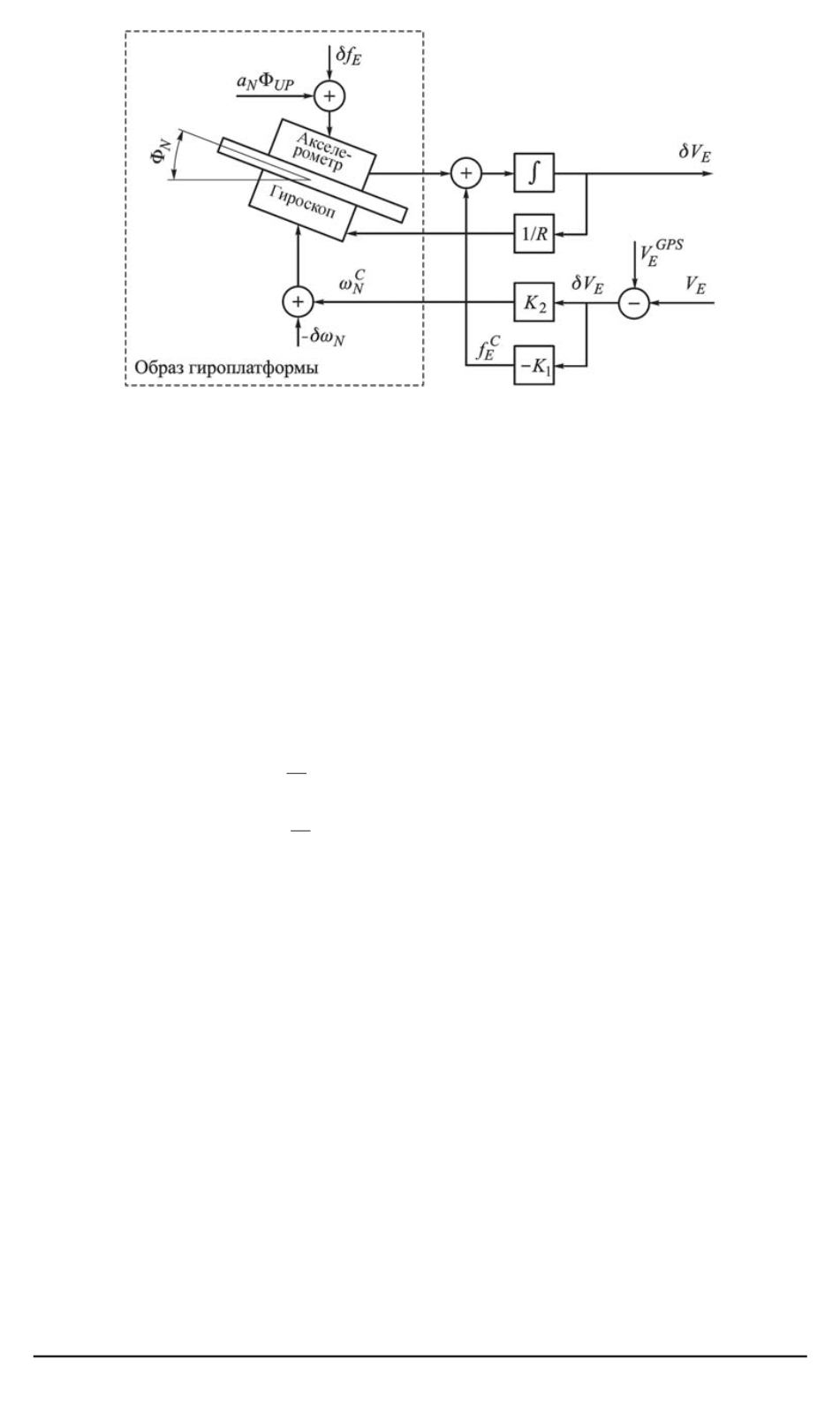
Рис. 1. Структурная схема погрешностей демпфируемой ИНС (восточный ка-
нал)
где
Φ
E
,
Φ
N
,
Φ
UP
— малые углы отклонения вычисляемого образа плат-
формы от идеального положения, отсчитываемые вокруг восточной,
северной и вертикальной осей географического трехгранника соот-
ветственно;
δf
E
,
δf
N
,
δω
E
,
δω
N
— смещения нуля акселерометров и
гироскопов в проекциях на географический трехгранник;
R
— радиус
Земли;
a
E
,
a
N
— горизонтальные ускорения носителя.
Отсюда нетрудно получитьуравнения, описывающие динамику из-
менения погрешностей по скорости для демпфируемой ИНС:
δ
¨
V
E
+
K
1
δ
˙
V
E
+
g
R
+
K
2
g δV
E
=
gδω
N
+ ˙
a
N
Φ
UP
+
δ
˙
f
E
;
δ
¨
V
N
+
K
1
δ
˙
V
N
+
g
R
+
K
2
g δV
N
=
−
gδω
E
−
˙
a
E
Φ
UP
+
δ
˙
f
N
.
Учитывая, что
K
2
gδV
E
=
gω
C
N
,
K
2
gδV
N
=
−
gω
C
E
и
K
2
1
/R
, в ква-
зиустановившемся режиме получаем
gω
C
E
=
gδω
E
+ ˙
a
E
Φ
UP
−
δ
˙
f
N
;
gω
C
N
=
gδω
N
+ ˙
a
N
Φ
UP
+
δ
˙
f
E
или, после интегрирования на некотором интервале времени
Δ
t
,
g
t
+Δ
t
t
ω
C
E
dt
=
g
t
+Δ
t
t
δω
E
dt
+ Δ
a
E
Φ
UP
−
Δ
δf
N
;
g
t
+Δ
t
t
ω
C
N
dt
=
g
t
+Δ
t
t
δω
N
dt
+ Δ
a
N
Φ
UP
+ Δ
δf
E
.
(1)
Соотношения (1) свидетельствуют о том, что в управляющих угловых
скоростях
ω
C
E
,
ω
C
N
, приложенных к вычисляемому образу платформы
70 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 3


