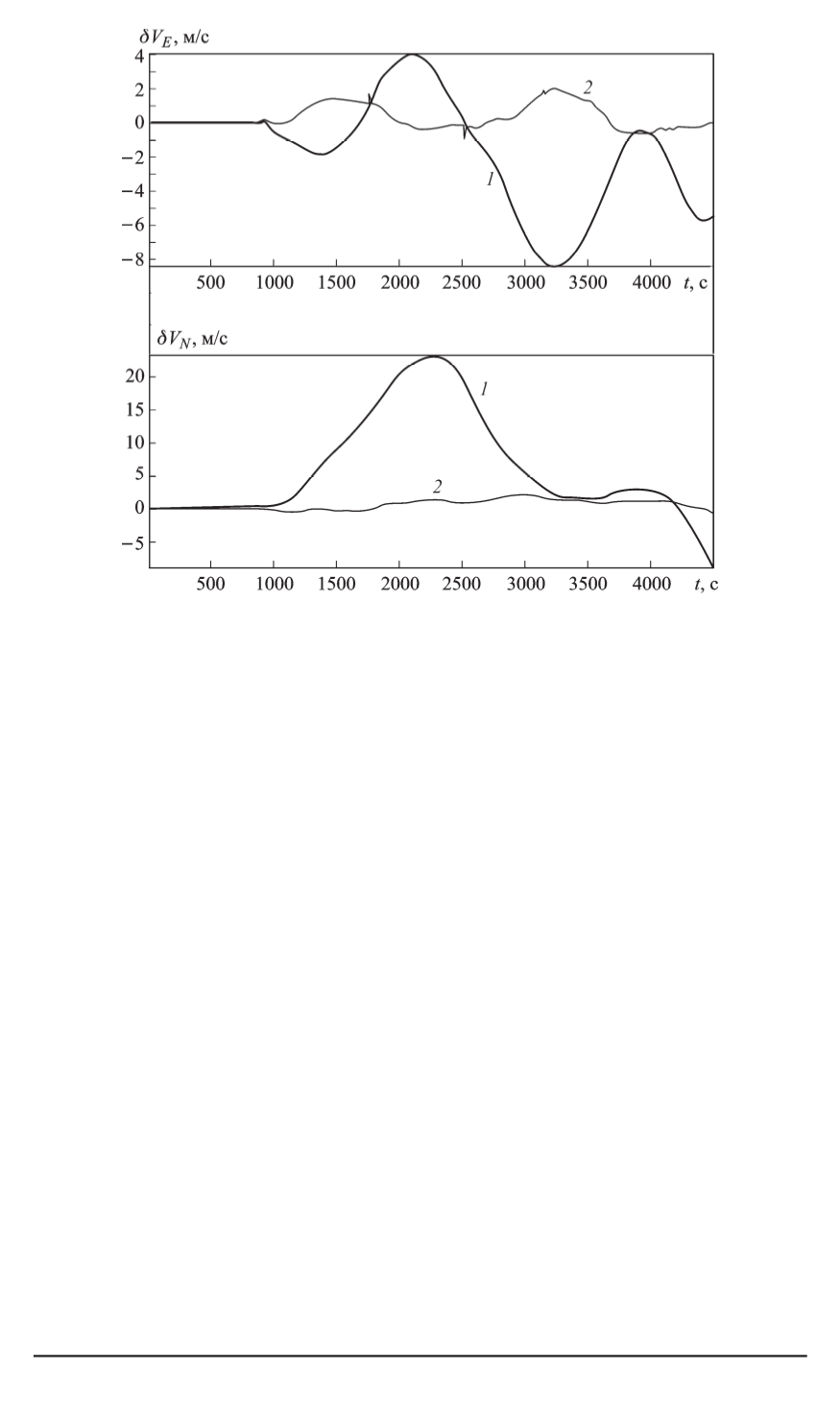
Рис. 6. Погрешностипо скоростиавтономной ИНС до (
1
) ипосле (
2
) компенса-
ции смещений нуля гироскопов
времени работы инерциального измерительного блока, интервал
Δ
t
составлял 300 с. Вычитание полученных оценок (рис. 5) из показаний
гироскопов позволило многократно уменьшить ошибку автономной
ИНС по скорости (рис. 6), что свидетельствует о корректности оцени-
вания.
Выводы.
Предложен прямой метод оценивания погрешностей дат-
чиков бесплатформенной ИНС. Метод рассмотрен применительно к
задаче полунатурного моделирования ИНС и успешно апробирован в
ходе испытаний инерциального измерительного блока среднего класса
точности. Получены оценки погрешности азимутальной выставки, а
также смещений нуля гироскопов и акселерометров ИНС.
СПИСОК ЛИТЕРАТУРЫ
1. Б р о м б е р г П. В. Теория инерциальных систем навигации. – М.: Наука, 1979.
– 296 с.
2. S a l y c h e v O. S. Applied inertial navigation: problems and solutions. – M.:
BMSTU Press, 2004. – 304 p.
3. С а л ы ч е в О. С. Волновое описание возмущений в задачах оценки ошибок
инерциальных систем навигации. – М.: Машиностроение, 1992. – 216 с.
4. K a l m a n R. E. A new approach to linear filtering and prediction problems //
Transactions of the ASME – Journal of Basic Engineering. – 1960. – Vol. 82. Series D.
– P. 35–45.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 3 77


