где
B
=
1 +
T
23
¯
ϕ
1
2 ¯
ϕ
1
;
C
=
ϕ
1
−
ϕ
+
T
23
ϕ
( ¯
ϕ
1
+ ¯
ϕ
2
)
¯
ϕ
1
¯
ϕ
2
ϕ
.
Из выражения (10) получаем
T
1
=
B
± √
B
2
−
C.
Значение
a
найдем из расчета хода первого вспомогательного луча,
входящего в систему под углом к оптической оси
α
1
= 1
и пересека-
ющего первый компонент на высоте
h
1
=
a
:
a
=
ϕ
(
T
1
+
a
+
T
1
a
¯
ϕ
2
)
ϕ
1
.
Соотношения, определяющие переход от исходных систем к обоб-
щенной и обратно, представлены в таблице.
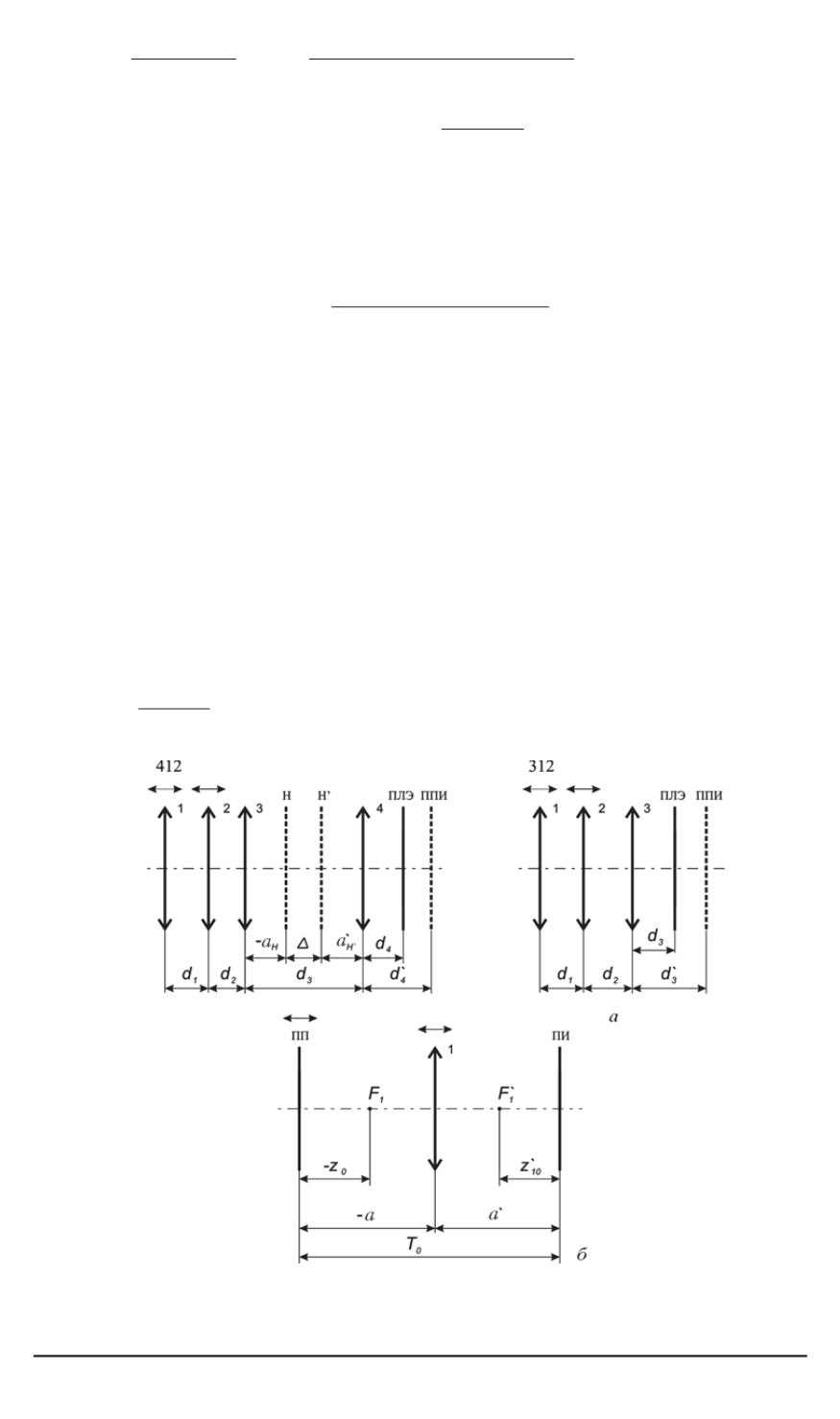
Аналогичным образом рассмотрим системы типов 412 и 312
(рис. 3,
а
). На рис. 3,
б
представлена обобщенная система. Здесь ПИ
является ППИ компонентов 3 и 4 (412) и компонента 2 (312) исходной
схемы.
Обобщенная система является однокомпонентной системой с по-
движной ПП, из работы [1] следуют формулы для расчета ее параме-
тров:
z
0
= (
i
0
−
i
1
)
Z
0
;
z
10
=
−
i
1
Z
10
;
f
2
1
=
i
1
(
i
1
−
i
0
)
F
2
1
,
(11)
где
Z
0
=
1 +
M
1
−
M
;
Z
10
= 1
−
Z
0
;
F
2
1
=
Z
2
0
−
Z
0
.
Рис. 3. Схемы вариообъективов типов 412, 312:
а
— исходные,
б
— обобщенная
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 3 33


