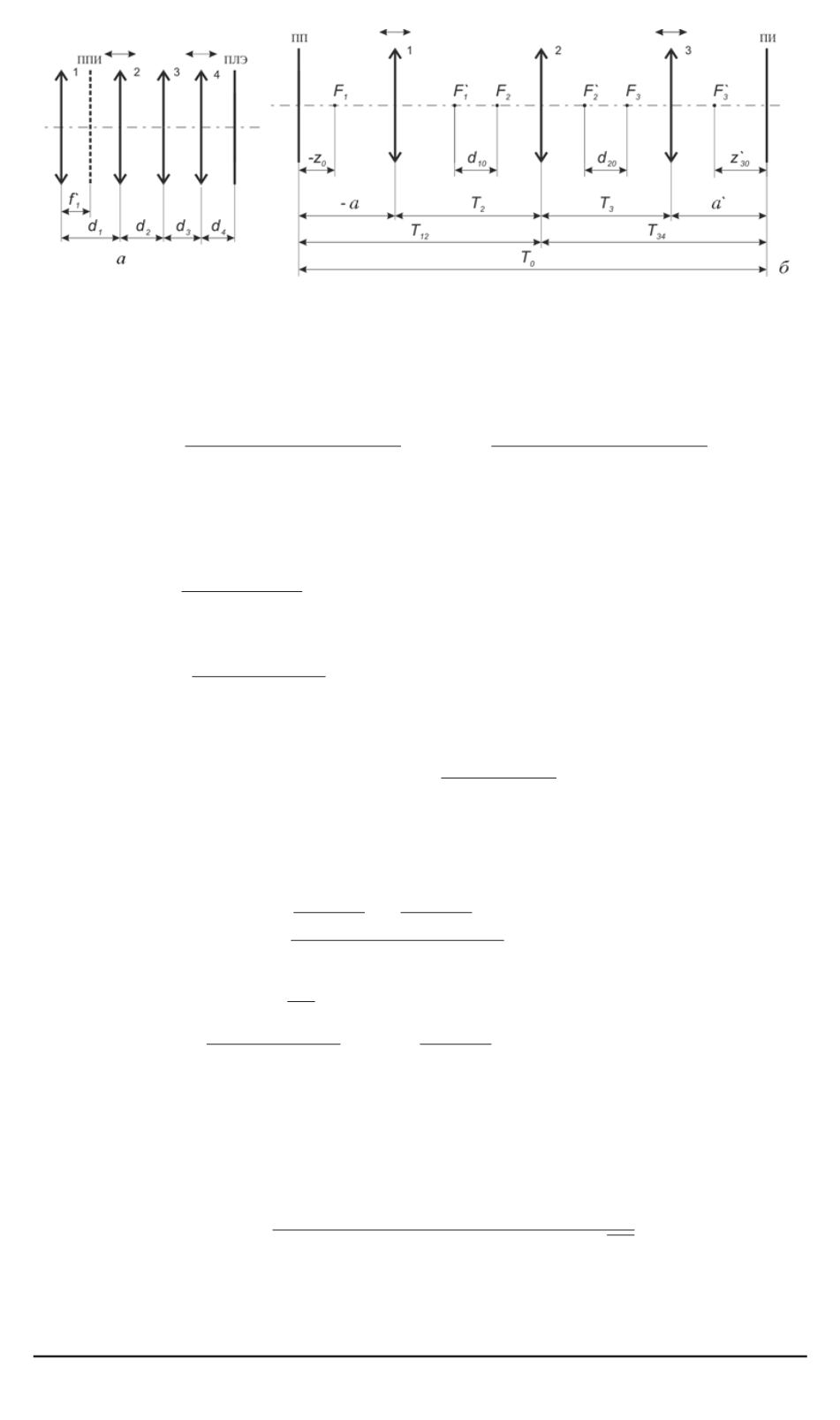
Рис. 4. Схема вариообъектива типа 424:
а
— исходная,
б
— обобщенная
работе [3], параметры такой системы рассчитываются по формулам:
f
2
1
=
(
i
1
−
i
2
) (
i
1
−
i
0
)
F
2
1
i
2
1
;
f
2
2
=
(
i
3
−
i
2
) (
i
1
−
i
2
)
F
2
2
i
1
;
f
2
3
=
i
3
(
i
3
−
i
2
)
F
2
3
;
z
0
=
(
i
1
−
i
0
)
Z
0
i
1
;
z
30
=
i
3
Z
30
;
d
10
=
(
i
1
−
i
2
)
D
10
i
1
;
d
20
= (
i
3
−
i
2
)
D
20
,
(14)
где
F
2
1
=
y α
2
y
+
γ
;
F
2
2
=
M
(
α
2
y
+
γ
)
2
;
F
2
3
=
F
2
1
;
Z
0
=
−
αy
;
Z
30
=
−
Z
0
;
D
10
=
αy
+
1 +
M
2
−
1
−
M
2
αy
α
2
y
+
γ
;
D
20
=
D
10
;
α
=
1
− √
M
2
2
;
γ
=
M
−
1
2
.
В представленных формулах
i
0
, i
1
, i
2
, i
3
характеризуют передаточ-
ные отношения между перемещениями компонентов,
M
— перепад
фокусных расстояний,
y
— параметр, зависящий от
i
3
и смещения
ПИ:
Δ =
i
3
m
4
−
m
2
m
3
+
αym
2
−
(1 +
γy
)
m
+
y
√
M
,
где
m
— переменный параметр, изменяющийся в интервале
−
1
m
1
и определяющий положение компонентов.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 3 35


