Функции
f
(
x
)
, g
(
x
)
, k
(
x
)
, h
(
x
)
определяются непосредственно из
динамической модели системы. В модели, описанной ранее, закон
управления с обратной связьюможет быть синтезирован на основе
изложенного подхода.
Правильный выбор базисных функций является важной частьюв
получении решения задачи разработаным методом. Базисные функции
использовались для определения не только точности приближения Га-
леркина, но и функции состояния, по которой рассчитывается закон
управления. Если базисные функции дают приближенные значения
функции
V
i,j
(
t, x
)
с не достаточной точностью, то алгоритм не бу-
дет сходиться. Для этого использовали следующий набор базисных
функций:
{
ϕ
j
}
10
j
=1
=
x
2
1
, x
1
x
2
, x
2
2
, x
1
x
3
, x
2
x
3
, x
2
3
, x
1
x
4
, x
2
x
4
, x
3
x
4
, , x
2
4
.
Начальный закон управления был разработан на основе линеари-
зации уравнений движения относительно желаемого угла атаки и со-
отвествующего расположения полюсов. Для этого были использованы
следующие исходные данные:
u
0
(
x
) = 0
,
48
x
1
−
2
,
82
x
2
−
0
,
732
x
3
−
3
,
77
x
4
.
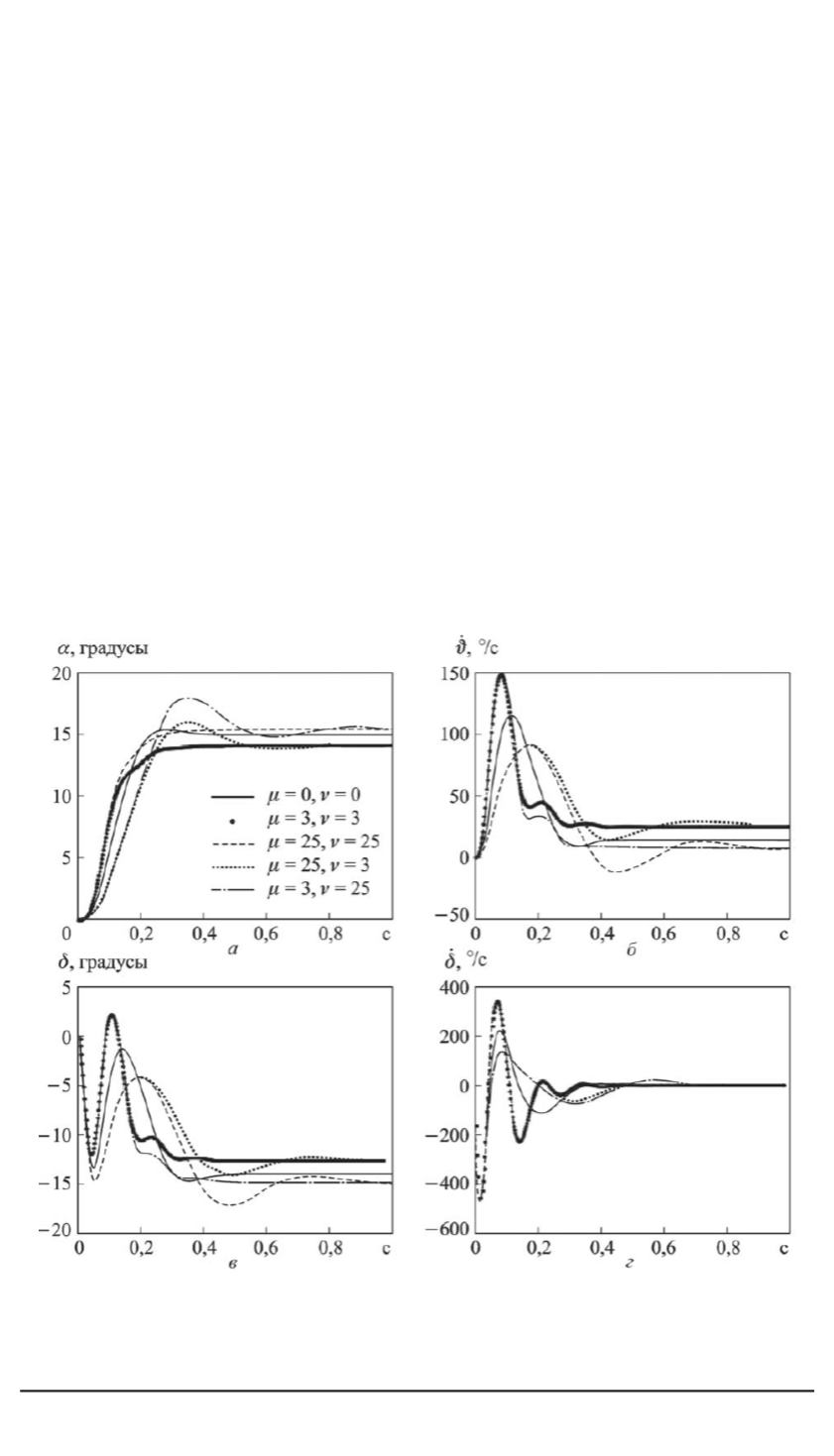
Результаты моделирования структурно-параметрического синтеза:
а
— угол атаки;
б
— угловая скорость тангажа;
в
— отклонение руля;
г
— скорость
отклонения руля
36 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 3


