














 10 / 18
10 / 18

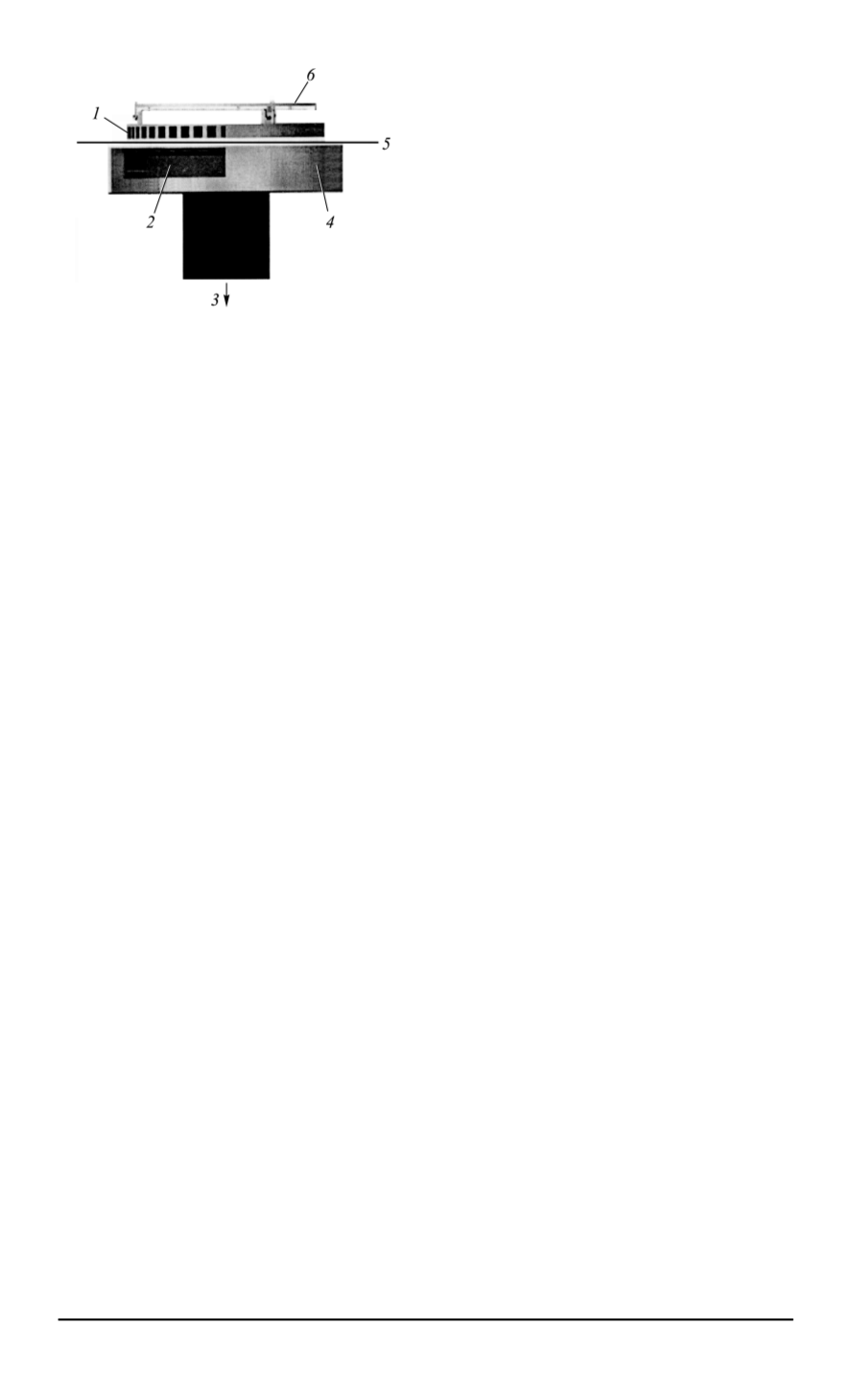
Рис. 8. Конструктивная схема маг-
нитной муфты:
1
— постоянные магниты;
2
— ВТСП;
3
— двигатель;
4
— вакуумный криостат
для ВТСП;
5
— стенка вакуумной каме-
ры;
6
— карусель
значение скорости вращения
составило 500 000 мин
−
1
[24].
Увеличение скорости вращения
приводит к снижению массы и га-
баритных размеров электромеха-
нических устройств. Уменьшение
масс и габаритных размеров воз-
можно и в электромеханических
устройствах со сверхпроводящими
обмотками. В этом случае возмож-
но применение и магнитных опор
с ВТСП, которые могут быть обес-
печены криосистемами основных
агрегатов и позволяют увеличить
их ресурс на высоких оборотах.
Весьма перспективно использование магнитных муфт на основе
пар ВТСП–постоянный магнит для передачи момента через герметич-
ную стенку, например, корпус космического объекта. Такие устройства
с вращающимся криостатом (рис. 8) реализованы для использования
в вакуумных камерах для нанесения покрытий на платы с радиоэлек-
тронными элементами при скорости вращения 1400 мин
−
1
[20].
Достаточно широкую область применения для космических техно-
логий имеют и опоры для поступательного движения. Для наземных
условий выполнено большое число макетов и элементов транспорт-
ных устройств, которые показывают возможность применения транс-
портных устройств на “магнитной подушке” с применением ВТСП
(система MAGLEV) [20]. Для космических условий предполагается
использовать их на разгонных участках систем электродинамического
разгона, в технологических транспортерах и для перемещения грузов
по поверхности Луны [4].
Способ бесконтактной фиксации взаимного положения с помощью
пар ВТСП–постоянный магнит при наличии магнитного поля полу-
чил название FPI-связь (field pinning interaction). Наиболее простой
пример ее реализации — бесконтактный манипулятор (рис. 9). В этом
случае на объекте, который необходимо перемещать, закреплены маг-
ниты, а в механической руке — ВТСП. После установки механической
руки напротив постоянных магнитов, выполняется захолаживание
ВТСП, и образование магнитной связи с объектом. Значение жестко-
сти этой связи зависит от расстояния между магнитом и ВТСП,
значения магнитного поля и размера ВТСП, которые выбираются в
зависимости от массы перемещаемого груза. При такой процедуре
при выборе расстояния, исключающего непосредственный контакт
механической руки и объекта, исключена возможность и их сопри-
косновения и удара, резких ускорений, контролируемых жесткостью
24 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2016. № 1