














 13 / 18
13 / 18

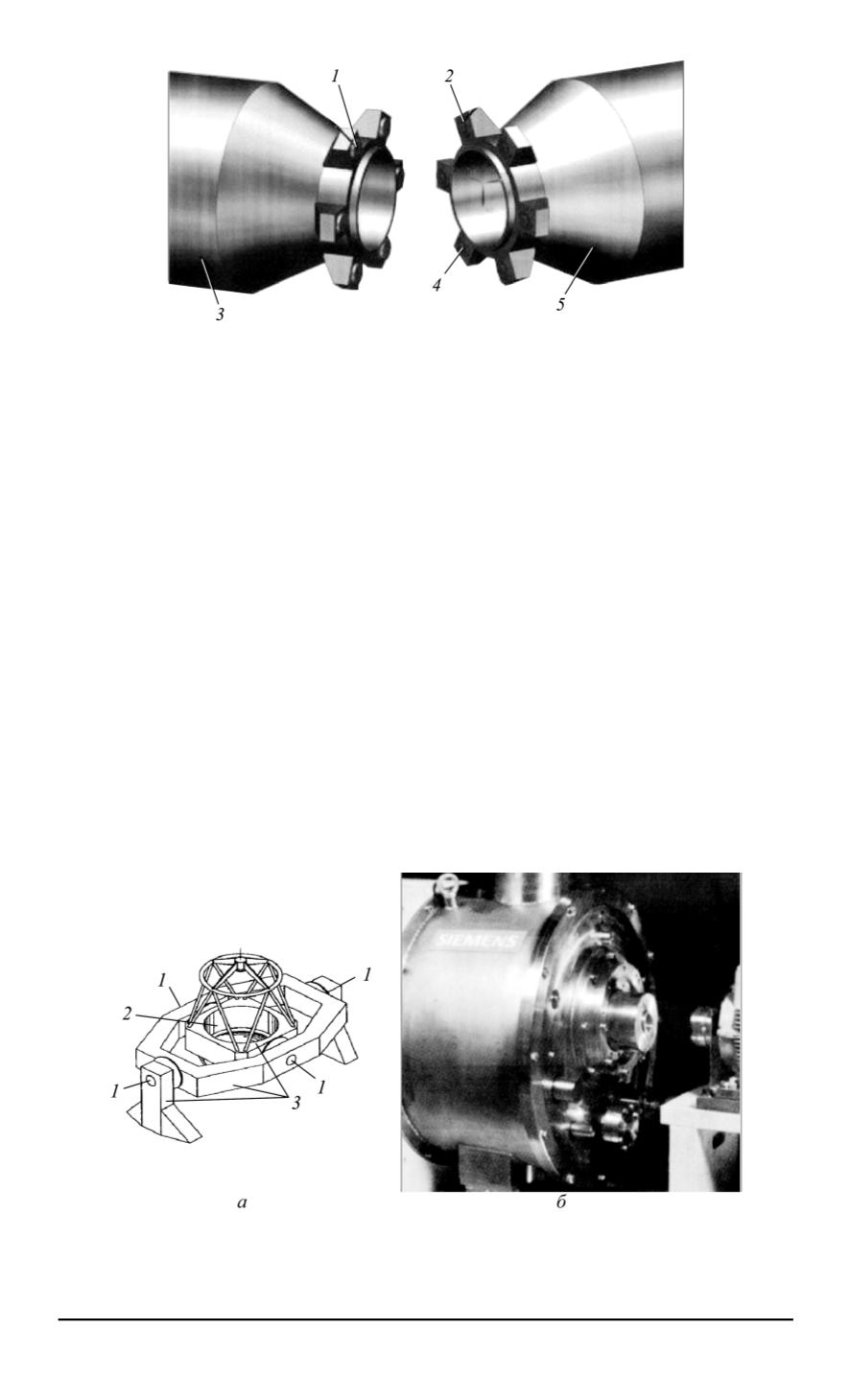
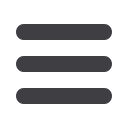
Рис. 11. Схема стыковки КЛА [27]:
1
— постоянные магниты;
2
— управляемые электромагниты;
3
— стыкуемый корабль;
4
— ВТСП;
5
— космическая станция
ханическими устройствами и трением эти возможности ограничены.
Применение бесконтактных FPI-связей, обеспечивающих стабильное
взаимное положение подвижных частей телескопа относительно из-
мерительной базы, дает возможность точной фиксации положения
оптической оси. При этом перемещение зеркала телескопа (рис. 12)
также может осуществляться бесконтактными методами, например,
с помощью электромагнитов. Таким образом, предполагается достиг-
нуть точности 0,1 угл. с и скорости 0,5 угл. с/с [4].
Важное значение для оценки перспектив применения пар ВТСП–
постоянный магнит имеет модульный характер устройств на их осно-
ве. При создании и исследовании модуля решаются основные про-
блемы и устраняются риски их возникновения уже на начальных эта-
пах разработки, что существенно удешевляет сам процесс разработки.
Кроме того, модули различных функциональных устройств (опоры,
манипуляторы, большие конструкции и т.п.) могут быть унифициро-
Рис. 12. Схема оптического телескопа на магнитных опорах (
а
) [6] и его внеш-
ний вид (
б
):
1
— подвесы с ВТСП;
2
— телескоп;
3
— основание телескопа
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2016. № 1 27