














 12 / 16
12 / 16

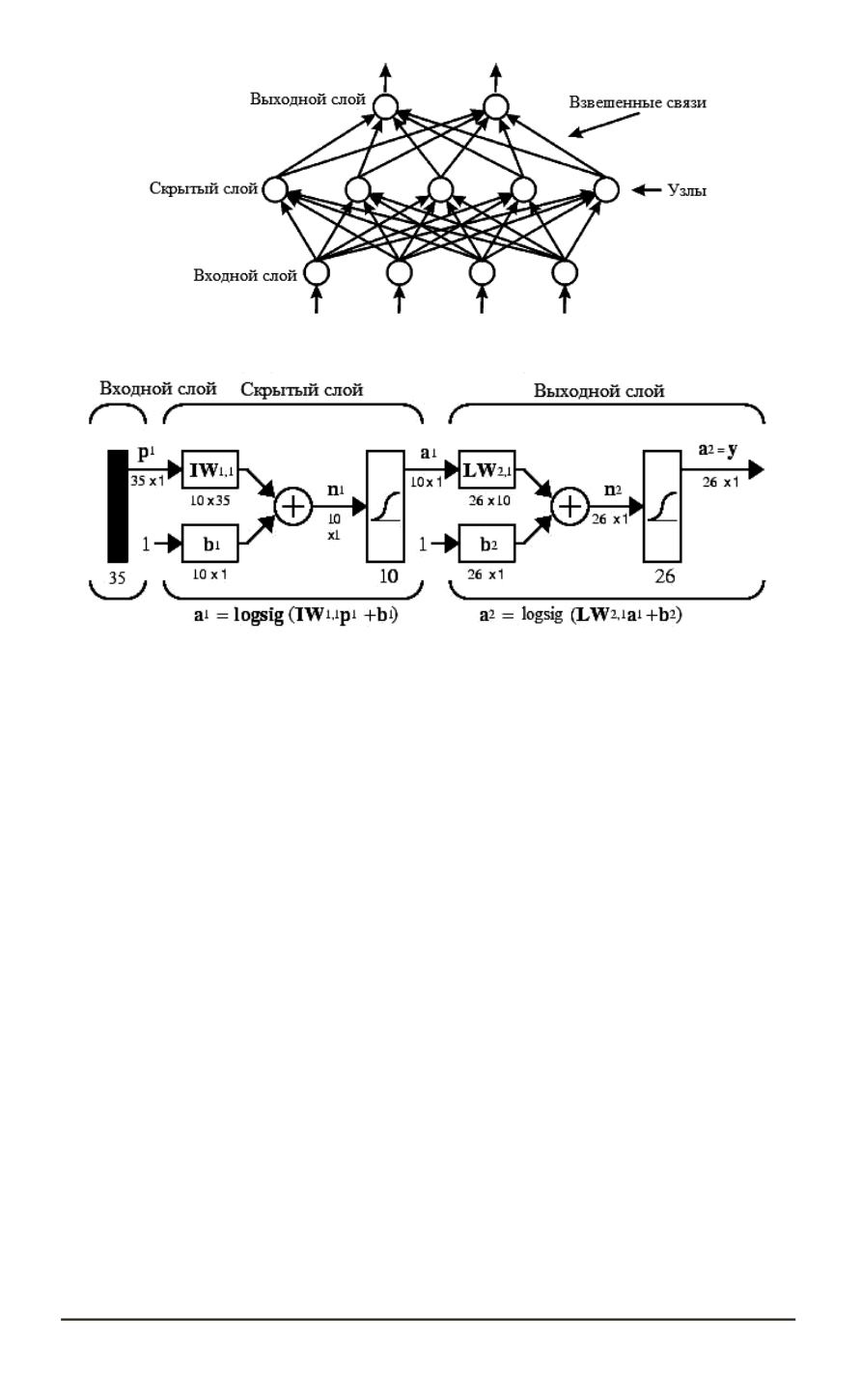
Рис. 6. Упрощенная модель НС
Рис. 7. Схема двухслойной НС для распознавания образов
•
обучение без учителя — НС формирует выходное пространство
решений только на основе входных воздействий (самоорганизу-
ющиеся сети);
•
обучение с подкреплением — в сети действует система назначе-
ния штрафов и поощрений от среды.
В процессе обучения сеть в определенном порядке просматривает
обучающую выборку. Один полный проход по выборке называется
эпохой обучения.
Перспективы применения обучающей системы для восстано-
вления тонкой моторики кистей рук у космонавтов в послеполет-
ном периоде и для диагностики состояния организма в условиях
гипогравитации.
Исследования в условиях гипогравитации прово-
дятся не только в космосе, но и путем модельных экспериментов на
Земле. Для этого используется метод “сухой” иммерсии, близко вос-
производящий в организме человека двигательные и другие обусло-
вливаемые невесомостью изменения физиологических функций [9].
При этом испытуемый погружается в воду с условием практически
полной безопорности, что обеспечивает близость биомеханических
условий среды к невесомости — снижение физических, аксиальных
и опорных нагрузок, и состояние глубокой сенсорной депривации,
связанной с исключением активности опорной афферентации и суще-
34 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 3