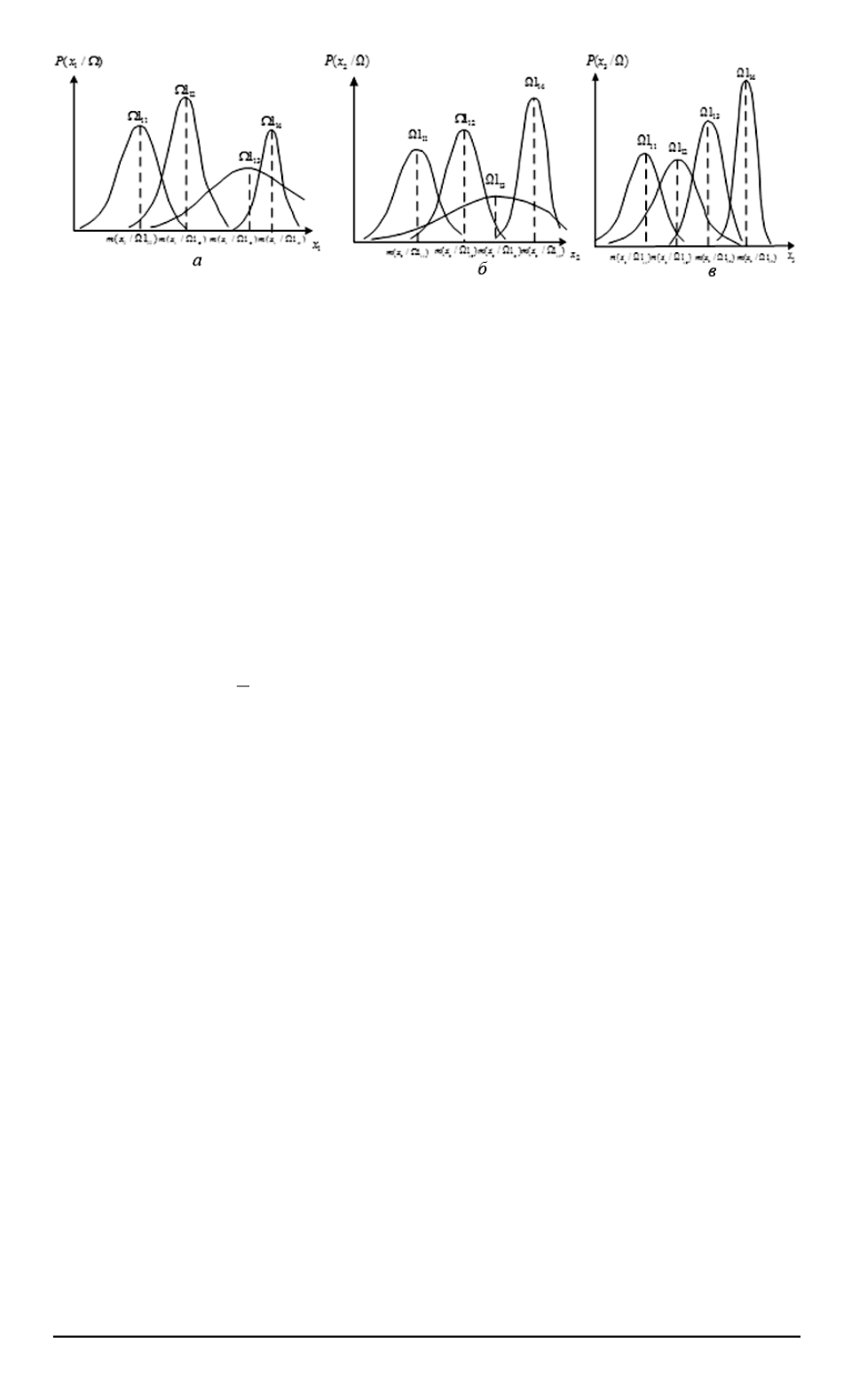
Рис. 4. Возможный вид условных плотностей распределения трех признаков
х
1
(
а
),
х
2
(
б
) и
х
3
(
в
) для четырех проверяемых гипотез (четыре вида технического
состояния)
Пусть во время измерений принята произвольная гипотеза
Ω
2
G,
тогда вектор
x
можно представить в виде
˜
x
=
M
(
x/
Ω) +
ξ.
Таким образом, вектор
x
является случайным вектором, принадлежа-
щим одной из
l
совокупностей (гипотез), причем вектор
x
распределен
нормально с плотностью
P
(
x/
Ω
k
) = (2
π
)
−
m/
2
|
R
(
x/
Ω
k
)
|
−
1
/
2
×
×
exp
−
1
2
(˜
x
−
M
(
x/
Ω
k
))
т
R
−
1
(
x/
Ω
k
) (˜
x
−
M
(
x/
Ω
k
))
.
(2)
Разумно отнести наблюдение
˜
x
к той гипотезе, для которой функ-
ция правдоподобия максимальна. Максимум функции правдоподобия
достигается минимизацией функционала
J
k
=
k
˜
x
−
M
(
x/
Ω
k
)
k
2
R
(
x/
Ω
k
)
−
1
,
(3)
где
k
˜
x
−
M
(
x/
Ω
k
)
k
2
R
(
x/
Ω
k
)
−
1
— квадратичная форма вектора
˜
x
−
M
(
x/
Ω
k
)
,
взвешенная с матрицей
R
−
1
(
x/
Ω
k
)
, т.е.
k
˜
x
−
M
(
x/
Ω
k
)
k
2
R
(
x/
Ω
k
)
−
1
=
= (˜
x
−
M
(
x/
Ω
k
))
B
R
−
1
(
x/
Ω
k
) (˜
x
−
M
(
x/
Ω
k
))
.
Для решения задачи находится минимальный функционал
J
k
. Наи-
более вероятные вектор математических ожиданий
M
(
x/
Ω
k
)
и кова-
риационная матрица
M
(
x x
т
)
определяются наиболее вероятной ги-
потезой
Ω
k
, выбранной в результате операции
min
k
J
k
.
Далее функционал
J
k
будем называть оценочным функционалом,
или функционалом
J
k
= (˜
x
−
M
k
)
т
R
−
1
k
(˜
x
−
M
k
)
,
где
R
k
=
R
(
x/
Ω
k
)
;
M
k
=
M
(
x/
Ω
k
)
.
106 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5


