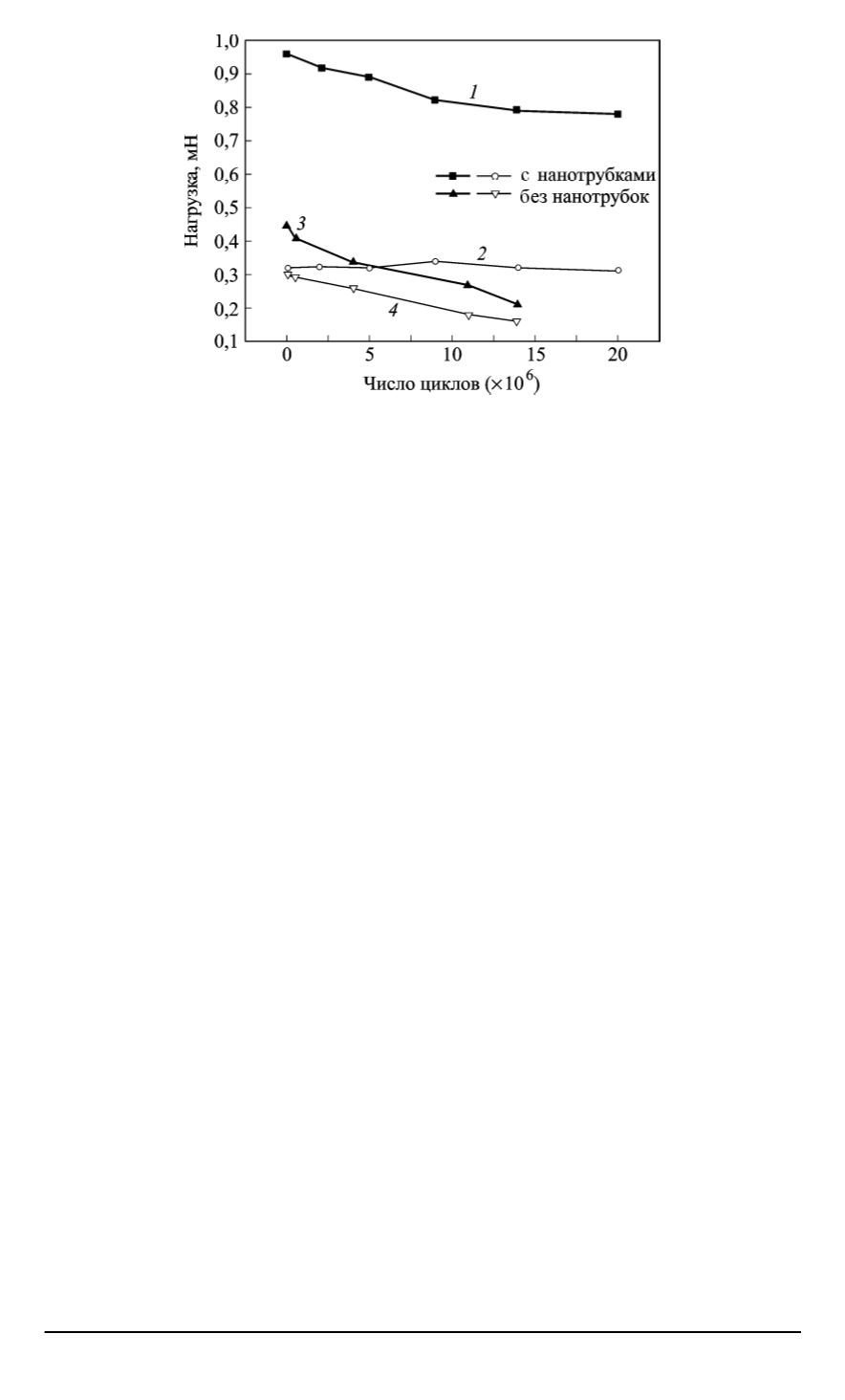
Рис. 8. Значения нагрузки при угле отклонения в 20
◦
(
1, 3
) и ее изменение при
уменьшении угла отклонения от 40
◦
до 20
◦
(
2, 4
)
применения теплового микроактюатора и подтверждают тот факт, что
именно биморфный тип микроактюаторов с V-образными канавками
[1] имеет наибольшие значения нагрузок среди известных аналогов.
Работа выполнена в рамках проектов Министерства образования
и науки РФ (ГК № 16.740.11.0080 от 1 сентября 2010 года) и РФФИ
№ 10-02-01336-офи_а.
СПИСОК ЛИТЕРАТУРЫ
1. G a r d n e r J., V a r a d a n V., A w a d e l k a r i m O. Microsensors, MEMS and
smart devices. – John Wiley@ Sons. Chichester. 2001. – 503 p.
2. S p r i n g e r Handbook of nanotechnology. 2nd Edition. Bharat Bhushan (Ed). –
Springer. 2007. – 1916 p.
3. E b e f o r s T. Polyimide V-groove joints for three-dimensional silicon transducers.
PhD thesis. Royal Institute of Technolgy. Stockholm. 2000. – 144 p.
4. E b e f o r s T., K a l v e s t e n E., S t e m m e G. Dynamic actuation of polyimide
v-grooves joints by electrical heating // Sensors and Actuators A. 1998. – Vol. 67. –
P. 199–204.
5. Ж у к о в А. А., К о р п у х и н А. С., Г р и н ь к и н Е. А. Микросистем-
ный биморфный привод устройств космической робототехники // Труды 19-й
Всеросс. НТК Экстремальная робототехника. С-Пб. ГНЦ “Центральный научно-
исследовательский институт робототехники и технической кибернетики (ЦНИИ
РТК)”. 2008. – C. 126–127.
6. Т и м о ш е н к о в С. П., Ж у к о в А. А., З а х а р о в А. А. Биморфный ба-
лочный актюатор с V-образными полиимидными канавками // Нано- и микро-
системная техника. – 2007. – № 7. – С. 60–64.
7. Ж у к о в А. А., К о р п у х и н А. С., К о з л о в Д. В., С м и р н о в И. П. Ме-
тодика измерений деформационных характеристик микроактюаторов // Сб. стат.
Второй Всерос. науч.-техн. конф. Актуальные проблемы ракетно-космического
приборостроения и информационных технологий. – М.: Радиотехника, 2010.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 2 93


