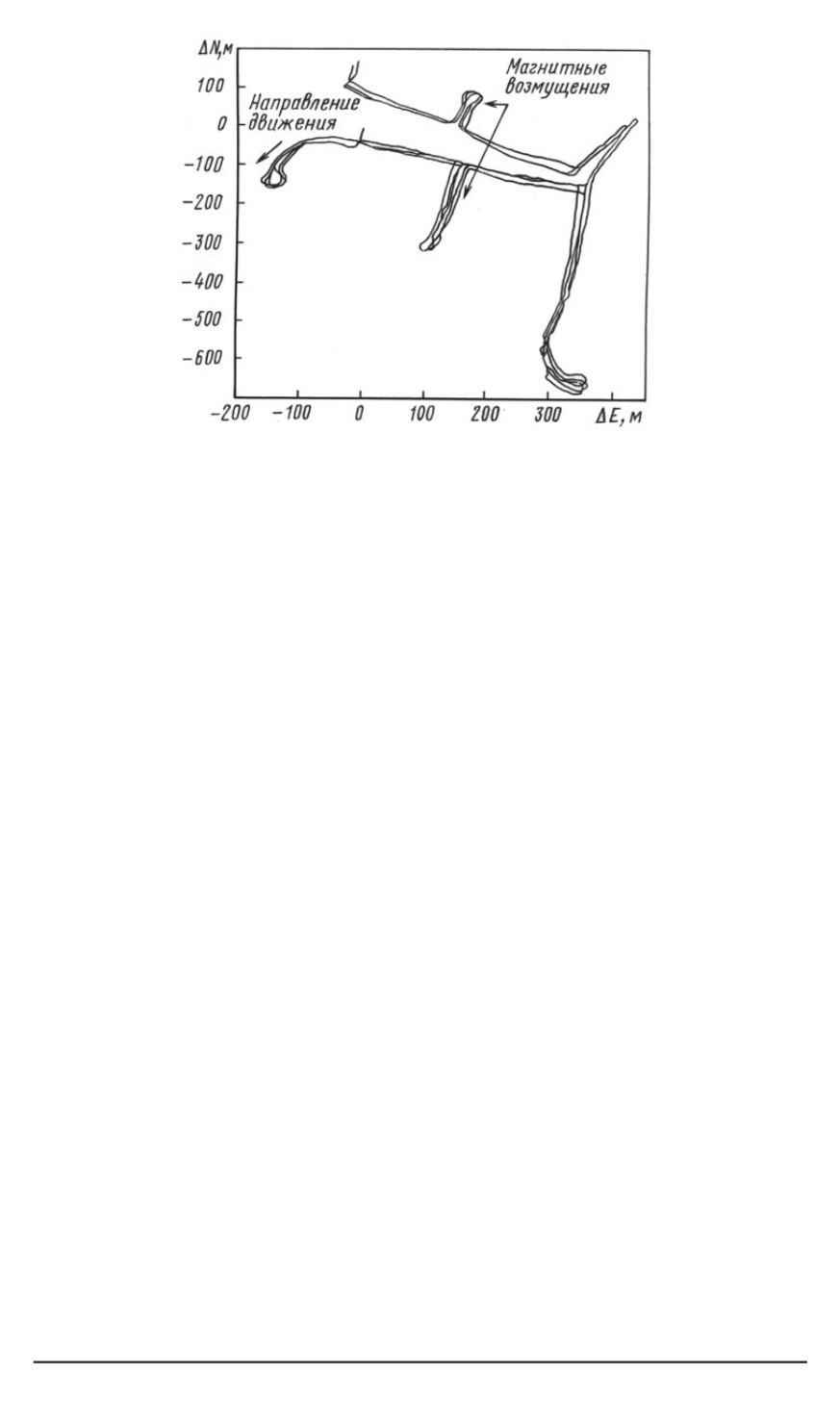
Рис. 9. Многократный проходмаршрута по магнитному компасу
дорожек, а существенные отклонения (более 100 м) в середине пря-
молинейных участков “восток-запад” — залегающей непосредственно
под покрытием дороги силовой электрической линией.
Стратегия быстрых поворотов.
Во время быстрых поворотов
длина шага уменьшается вплоть до 80%. Особенно это сказывается
на больших поворотах, например на 180
◦
. С учетом данного эффекта
погрешность определения длины шага составляет 0,1%, а без учета —
2,5%.
Детектирование возмущений.
Главным недостатком магнитного
компаса является его реакция на локальные возмущения магнитно-
го поля, а главным недостатком гироскопических датчиков (особенно
низкоточных) — необходимость периодической коррекции величины
их дрейфа по внешней информации. Однако на коротком интервале
времени гироскопы обеспечивают достаточно точную информацию об
изменении азимутального угла; очевидна необходимость интегрирова-
ния показаний двух устройств. Магнитный компас при этом обеспечи-
вает внешнюю информацию для коррекции параметров гироскопов, а
гироскопы используются для детектирования магнитных возмущений.
На рис. 10 хорошо виден эффект действия магнитных возмущений при
сравнении курсов, полученных с помощью двух датчиков.
Заключение.
Даже если для пешеходной навигации используются
те же датчики, что и для механических подвижных объектов (автомо-
билей, самолетов), способы использования их измерений совершенно
разные. Направление движения человека далеко не всегда совпадает
с ориентацией его тела. Для коррекции азимутального угла при этом
применяется физиологическая модель походки человека.
98 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 2


