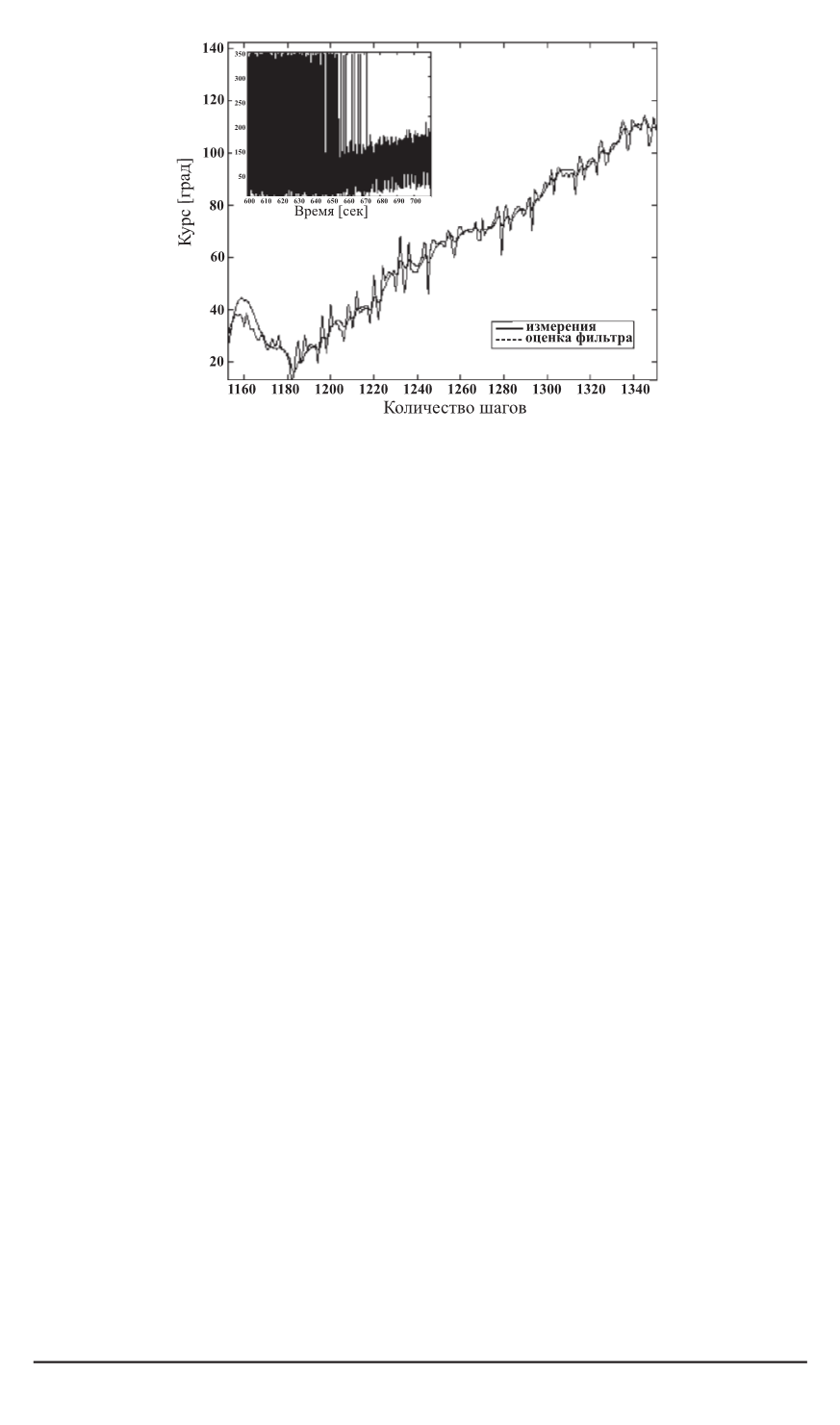
Рис. 8. Измерения курсового угла и их оценка низкочастотным фильтром
— оценить только изменения направления движения. Повороты тела
и шум имеют более высокую частоту, чем изменение направления
движения, и эффективно сглаживаются любым низкочастотным филь-
тром.
Ошибка установки навигационного комплекса.
Навигационный
комплекс закрепляется на теле пешехода, и, в общем случае, суще-
ствует угол рассогласования между его продольной измерительной
осью и направлением тела вперед (аналог угла невыставки в азимуте
традиционной ИНС). Для того чтобы учесть это рассогласование, не-
обходимо использовать показания приемника спутниковых сигналов.
Точность этих показаний растет с увеличением скорости движения.
Повторяемость траектории
. Одним из преимуществ магнитного
компаса является то, что он непосредственно измеряет вектор напря-
женности магнитного поля в данной точке. В отсутствие магнитных
возмущений этот вектор можно считать постоянным, но на реальном
маршруте он искажен множеством локальных наводок от источников:
“жесткого” магнитного возмущения — постоянных магнитов и источ-
ников электрического тока и “мягкого” возмущения — средоточия маг-
нитных материалов.
Мощность источников и их месторасположение со временем из-
меняются незначительно, поэтому возможно создать карту магнитных
возмущений для их компенсации. Если же пользователя интересует
не столько абсолютное значение координат, сколько повторяемость
траектории его движения на маршруте, никакой дополнительной ком-
пенсации не требуется. На рис. 9 представлены результаты нескольких
проходов по одному и тому же маршруту. В целом, они практически со-
впадают. Небольшие расхождения обусловлены шириной пешеходных
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 2 97


