Таблица
№ рисунка Вариант моделирования
K g q d
22
d
12
A
0
3,
а, б
; 4
1
0,1 100 1 0,22 2,21 10
5, 6, 7
2
10 1000 1 0,18 4,46 50
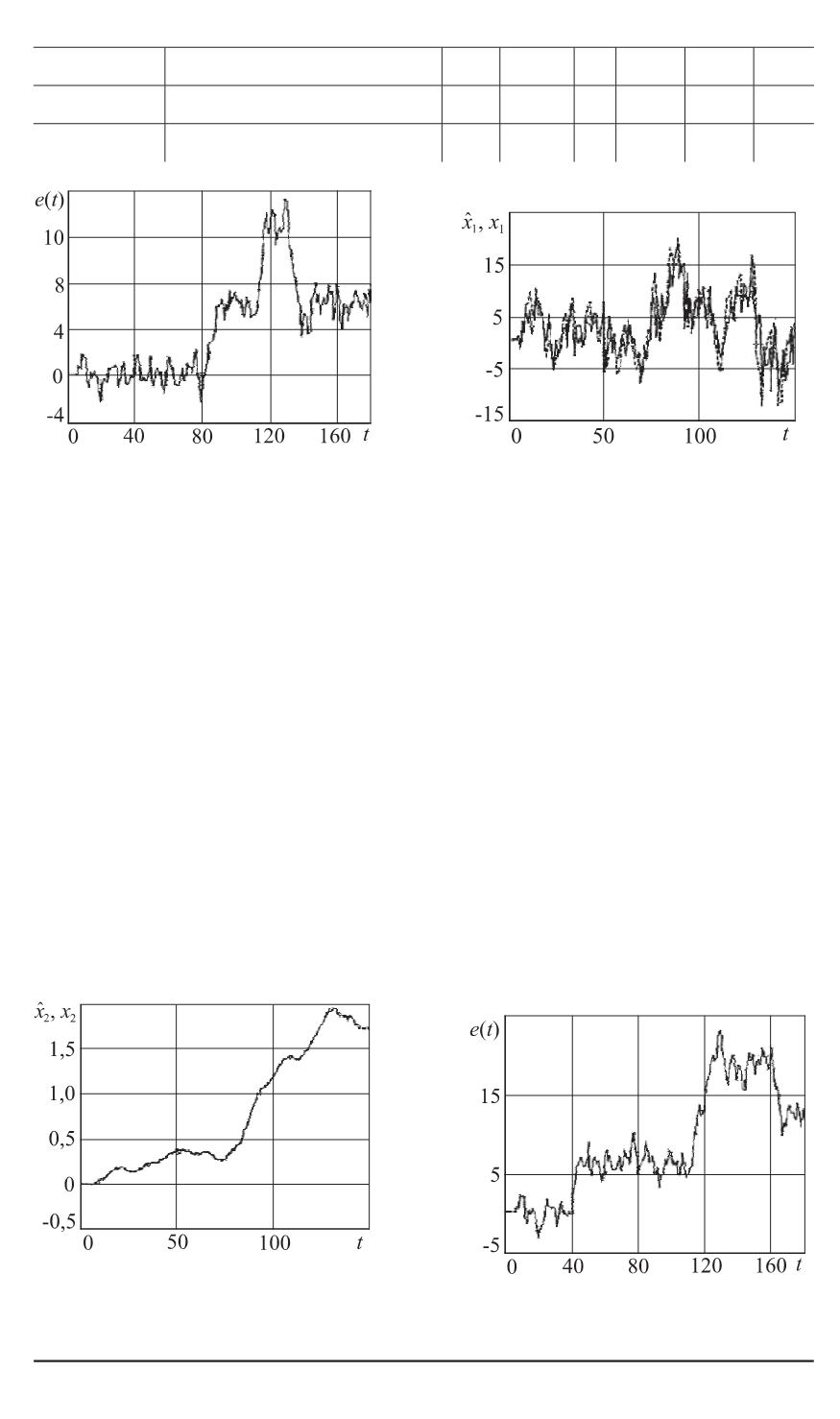
Рис. 4. График ошибок слежения
за сигналом по фазе для первого
варианта моделирования
Рис. 5. Зависимости наблюдения
и сообщения (частота сигнала)
Зависимости наблюденияи сообщения(частота сигнала) по анало-
гии с рис. 3,
а
приведены на рис. 5, однако, получены эти зависимости
при втором моделировании (см. таблицу). В отличие от рис. 3,
а
сле-
жение за частотой сигнала здесь проходит с б´ольшей ошибкой, чем в
предыдущем случае.
На рис. 6 представлен график слеженияза сигналом по фазе для
второго варианта моделирования(см. таблицу). Однако вместо посто-
янного монотонного нарастания, как показано на рис. 3,
б
, поя вля ются
участки с перескоками фазы. Это свидетельствует о нестабильности
сигнала, хотя, качество слежения за фазой сигнала достаточно высо-
кое.
На рис. 7 представлен график ошибок слеженияза сигналом по фа-
зе. Как видно из рис. 7, амплитудные значенияошибок не изменились
Рис. 6. График слежения за сигна-
лом по фазе для второго варианта
моделирования
Рис. 7. График ошибок слежения
за сигналом по фазе
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 1 55


