подвижная цель в центре имела ЭОП на 20 дБ ниже, чем ЭОП МП
(рис. 2). Модель движения цели (
p
= 1
) была линейной, и приращение
вектора координат во времени в формуле (4) определялось выраже-
нием
Δ
r
(1)
R
(
t
) =
v
(1)
t,
(19)
где вектор скорости
v
(1)
= 0 6 0
т
соответствовал движению
объекта вдоль оси
0
y
со скоростью 6 м/с (21,6 км/ч). Таким образом,
цель за период обзора
Т
= 1
с, характерный для РЛС ОЛП, не выхо-
дила из элемента дальности, составляющего в данном случае 10 м. На
рис. 2 приведены результаты фокусировки двухинтенсивныхотметок
МП, расположенныхпо краям, а отметка от подвижной цели в центре
не видна ввиду ее малой интенсивности.
При применении алгоритма СДЦ на основе расчета РФ (18) посто-
янная времени ФВЧ
τ
f
= 10
мс при длительности периода зондирова-
ния
T
r
= 1
мс. До установления фильтров выполнялось 64 итерации
(18) по
k
, и последние значения на выходе фильтров для каждой ча-
стоты
ω
m
и номера приемного устройства
n
r
использовались при ко-
герентной фокусировке согласно алгоритму (14) в каждой точке пря-
моугольной дискретной сетки на плоскости
(
x, y
)
. Результаты работы
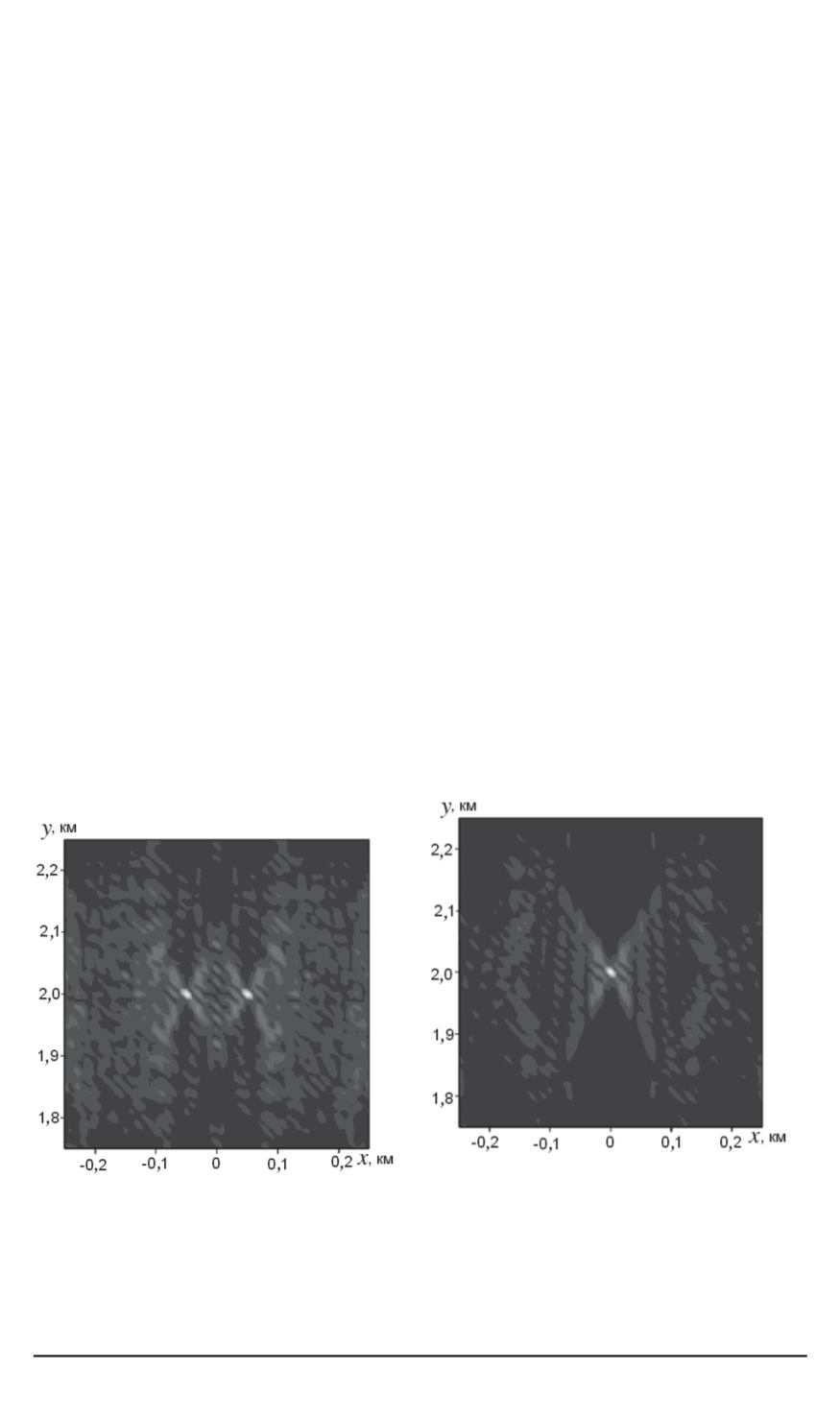
алгоритма ПВО с системой СДЦ по варианту 1 приведены на рис. 3.
Видно, что местные предметы подавлены, а подвижная цель выделена
на ихфоне.
Рис. 2. Топографическая диаграмма
модуля ССФ в горизонтальной пло-
скости при наблюдении двух непо-
движных МП с ЭОП 100 м
2
и подвиж-
ной цели в центре с ЭОП 1 м
2
и ско-
ростью 6 м/с. Режекция неподвижных
МП отсутствует, цель не видна
Рис. 3. Топографическая диаграмма
модуля ССФ в горизонтальной пло-
скости при наблюдении двух непо-
движных объектов с ЭПР 100 м
2
и
подвижного объекта в центре с ЭПР
1 м
2
и скоростью 6 м/с при варианте 1
системы СДЦ. Неподвижные объек-
ты подавлены, подвижный выделен
76 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 3


