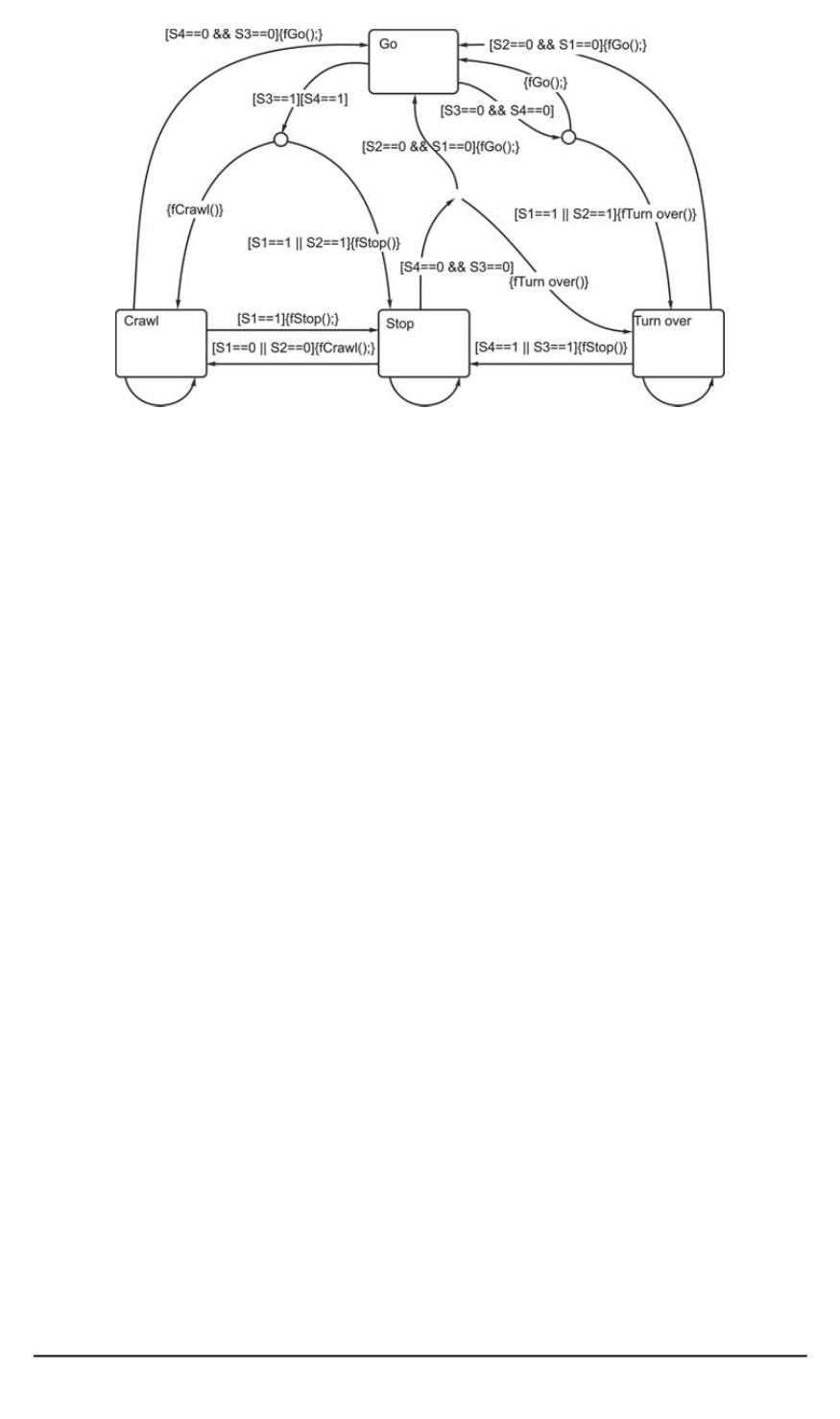
Рис. 7. Автомат распознаванияпрепятствий в среде Matlab
срабатывании дальномера
1
, при этом сигналы с дальномеров
2. . . 4
должны отсутствовать. На рис. 6,
б
. . .
в
показаны диаграммы дискрет-
ных сигналов, полученных с дальномеров (см. рис. 6,
б
), и диаграммы
сигналов управления приводами левого и правого бортов и штанги
(см. рис. 6,
в
). Рассматриваемый алгоритм распознавания препятствий
можно формализовать в виде автомата, приведенного на рис. 7. Здесь
использовались те же обозначения состояний, что и на рис. 2.
Описанный выше алгоритм распознавания препятствий использо-
вался при моделировании движения графической модели ЛРР в неде-
терминированной среде. Моделирование подтвердило работоспособ-
ность алгоритма управления ЛРР в автоматическом режиме.
Экспериментальное исследование.
Для проверки работоспособ-
ности предложенной системы управления в реальных условиях был
изготовлен макет ЛРР (рис. 8). Размеры транспортного модуля мас-
сой 8 кг составляют
400
×
440
×
140
мм. Беспроводная телевизионная
камера работает в диапазоне частот 2,4 ГГц. В ручном режиме опера-
тор управляет движением робота с пульта ручного управления, кон-
тролируя рабочую зону с помощью пультового монитора. Управляю-
щие сигналы от пульта к транспортному модулю ЛРР передаются на
двух частотных диапазонах: 35МГц — для приводов колесных блоков;
27МГц — для привода штанги. В автоматическом режиме оператор
задает направление движения робота, визуально контролируя процесс
движения и преодоления препятствий. Переключает режимы управле-
ния оператор также с пульта.
Испытания макета ЛРР показали, что при движении по пересечен-
ной местности робот имеет высокую маневренностью, преодолевая
препятствия (камни, кирпичи, бордюры) высотой до 70 мм (половина
диаметра колеса) со скоростью более 2 м/с.
44 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 3


