•
преодоление габаритных препятствий. Высота препятствия в
этом режиме больше радиуса колес, но меньше половины длины ЛРР
(около 200 мм). Движение производится с помощью привода поворота
штанги.
Автономное управление роботом
. Управление ЛРР осуществля-
ется с пульта оператора. Однако возможны ситуации, когда ЛРР оказы-
вается вне зоны наблюдения или связь с ним теряется. В этих случаях
ЛРР должен автоматически определять типы возникающих перед ним
препятствий и выбирать соответствующий способ их преодоления.
Для этой цели в состав бортовой системы управления включены пять
малогабаритных инфракрасных дальномеров GP2D12F фирмы Sharp,
расположенных на штанге и транспортном модуле ЛРР (см. рис. 1). По-
ложение штанги контролируется шестью бесконтактными концевыми
датчиками. В алгоритме распознавания типа препятствий предусмо-
трено определение высоты препятствия с последующим отнесением
его к одной изтрех категорий — малое, высокое и непреодолимое,
а также предусмотрено определение условий работы в ограниченном
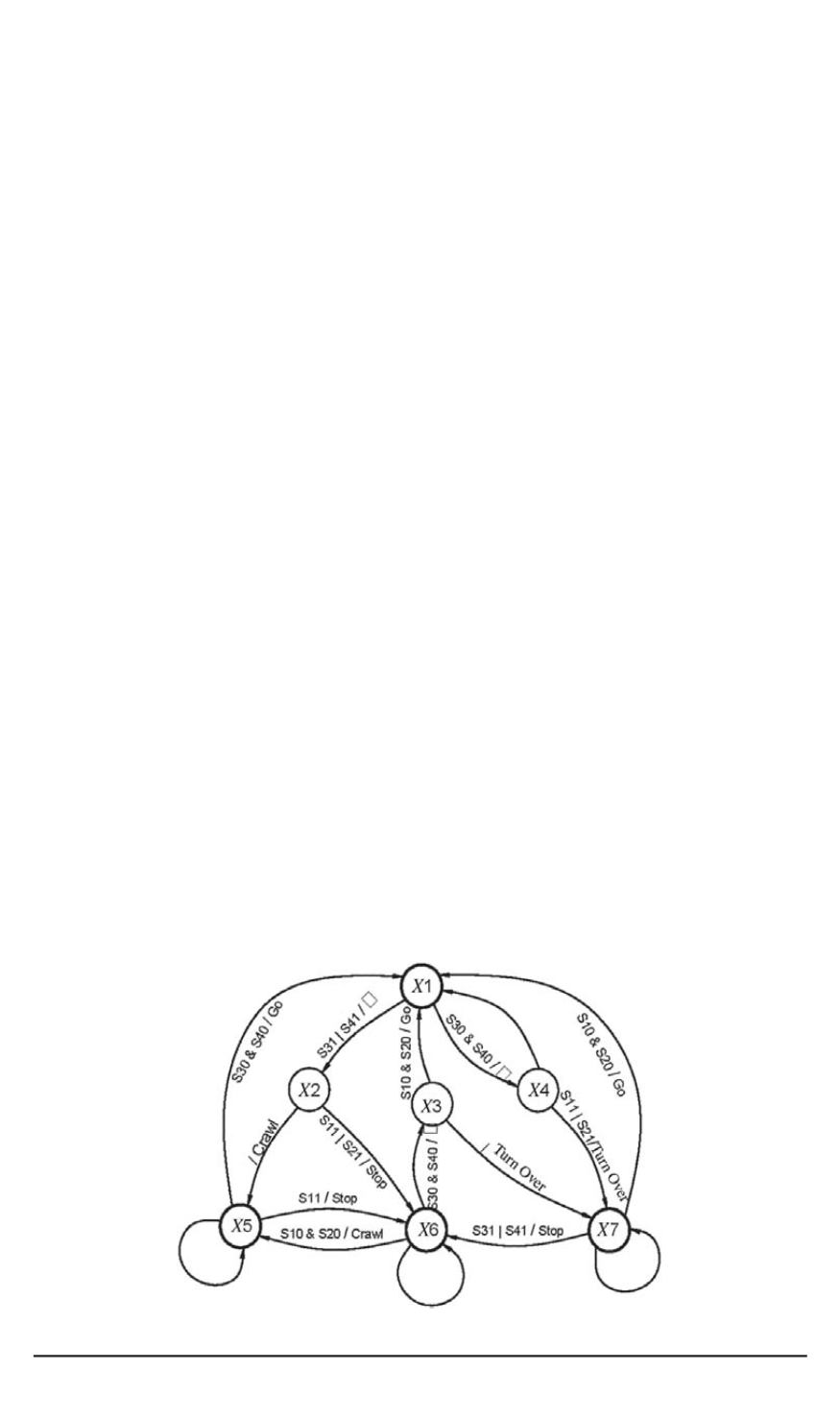
пространстве. На рис. 2 приведен алгоритм управления ЛРР в зависи-
мости от типов возникающих препятствий.
На рис. 2 обозначено:
X
1
— состояние, соответствующее малым
препятствиям (режим перемещения по пересеченной местности —
“Go”);
X
2
, X
3
, X
4
— промежуточные состояния;
X
5
— состояние, со-
ответствующее режиму перемещения в ограниченном пространстве —
“Crawl”;
X
6
— состояние, соответствующее непреодолимым препят-
ствиям, порождающее команду “Stop”);
X
7
— состояниe, соответству-
ющее габаритным препятствиям (режим переворотa — “Turn Over”).
Дальномеры могут находиться в двух возможных состояниях: препят-
ствие обнаружено (
S
i
1
— дальномер
S
i
срабатывает) и препятствие не
обнаружено (
S
i
0
— дальномер
S
i
не срабатывает).
Рис. 2. Алгоритм управленияЛРР
40 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 3


