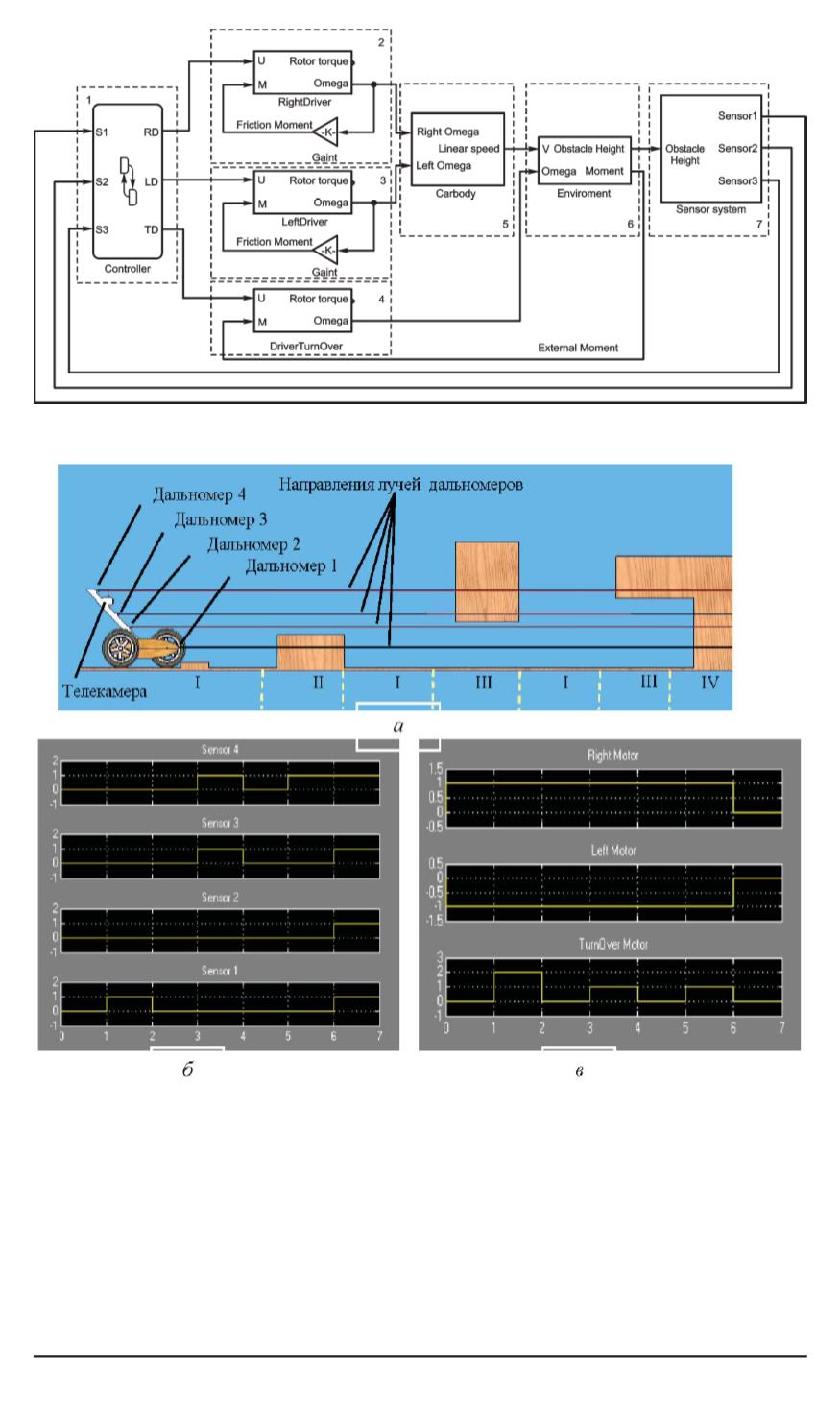
Рис. 5. Блок-схема системы управленияЛРР
Рис. 6. Схема распознавания(
а
), диаграммы сигналов дальномеров (
б
) и сигна-
лов управленияприводами (
в
) в режиме автоматического распознаванияпре-
пятствий
перемещения в ограниченном пространстве. Препятствие IV отно-
сится к категории непреодолимых. Каждый дальномер настроен на
определенное пороговое значение дальности. Как следует из рис. 6,
а
,
препятствие идентифицируется, например как “препятствие II”, при
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 3 43


