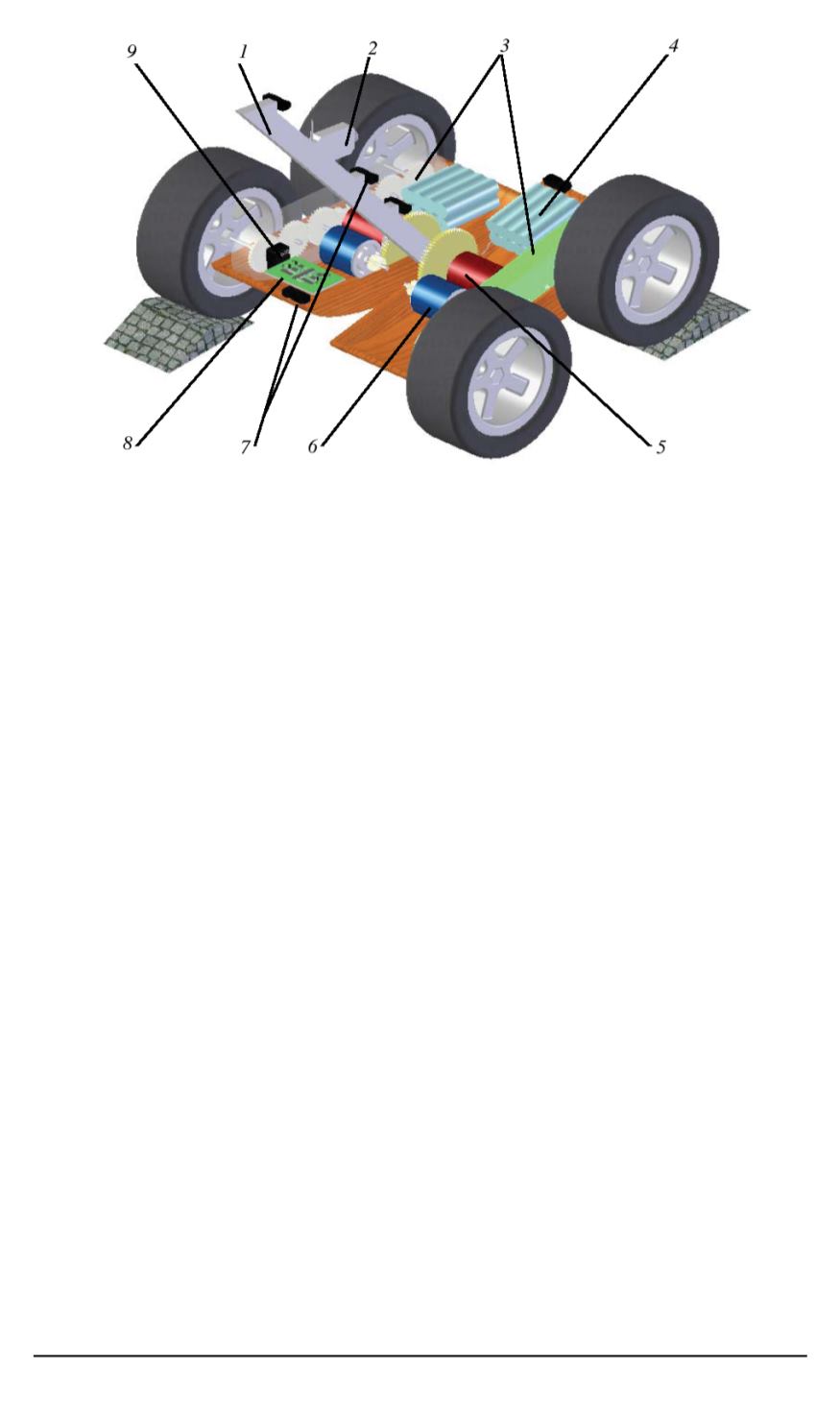
Рис. 1. КонструкцияЛРР:
1
— штанга;
2
— телекамера;
3
— блок редукторов;
4
— аккумуляторы;
5
— двигатель
привода колес правого борта;
6
— привод штанги;
7
— инфракрасные дальномеры;
8
— платы управления;
9
— импульсный датчик угла
блоков с двумя ведущими колесами на каждом, шарнирно соединен-
ных горизонтальной осью (рис. 1). Каждый из блоков, представляю-
щих собой колесную пару, способен поворачиваться вокруг этой оси
относительно другого колесного блока. Для снижения как массы ро-
бота, так и сложности управления в каждый блок входит только один
двигатель
5
постоянного тока и блок редукторов
3
, черезкоторый
вращение передается на оба колеса (все колеса — ведущие). Для пре-
одоления габаритных препятствий в конструкции ЛРР предусмотре-
на вертикальная штанга
1
, установленная посередине горизонтальной
оси на равном расстоянии от каждого колесного блока. Допустимый
угол поворота штанги составляет
±
180
◦
. Привод
6
вращения штанги
содержит два мотор-редуктора постоянного тока, по одному на каждом
борту ЛРР. На штанге смонтирована беспроводная телевизионная ка-
мера
2
и система инфракрасных дальномеров
7
.
Такая конструктивная схема позволяет роботу функционировать в
трех основных режимах:
•
перемещение по пересеченной местности. В этом режиме пре-
пятствия могут располагаться произвольно, но их высота не долж-
на превышать половины диаметра колес (около 70 мм). Перемещение
осуществляется с помощью приводов колесных блоков;
•
перемещение в ограниченном пространстве. Размер зоны обслу-
живания в этом режиме составляет
450
×
500
×
150
мм, что соответству-
ет, например пространству под днищем автомобиля. Штанга устана-
вливается в горизонтальное положение;
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 3 39


