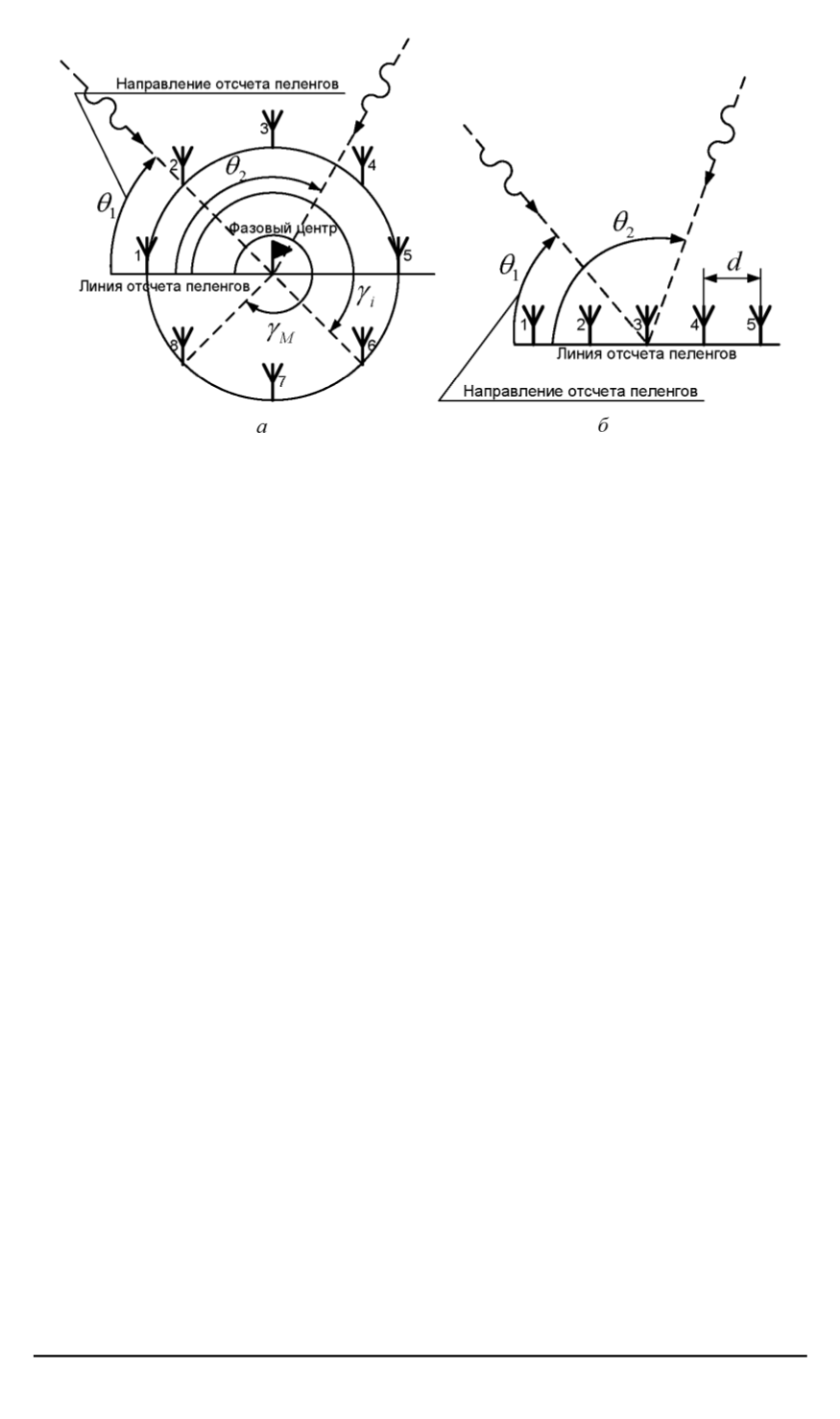
Рис. 1. Пространственные конфигурации антенных систем:
а
— круговая,
б
— линейная
— азимуты (пеленги) ИРИ;
— углы места ИРИ.
Поскольку на результаты измерений неизбежно накладывается по-
меха, а также имеют место ошибки измерений, обусловленные ис-
пользуемой аппаратурой, необходимо получить не только точечные
оценки искомых параметров, но и их ковариационные матрицы или,
по крайней мере, дисперсии.
Известны способы пеленгации с повышенной разрешающей спо-
собностью [1, 2]. Но нам не известны работы, в которых при опреде-
лении пеленгов ИРИ учитывались бы погрешности всех параметров,
участвующих в определении значений пеленгов.
В патенте [2] задача решается с помощью
l
P
-регуляризации. Этот
способ требует достаточно много времени для обработки сигнала, что
не позволяет его применить в оперативной обстановке, и квалифи-
цированных операторов, так как в методе необходимо для каждого
измерения задавать значения параметра регуляризации и показатель
степени регуляризирующего функционала. Однозначных подходов для
их выбора не существует.
Способ [1] многосигнальной пеленгации ИРИ на одной частоте
включает в себя прием многолучевого сигнала посредством многоэле-
ментной АС, синхронное преобразование ансамбля принятых сигна-
лов, зависящих от времени и номера элемента АС, в цифровые сигна-
лы, преобразование цифровых сигналов в сигнал-вектор амплитудно-
фазового распределения
y
(
u, θ, β
)
, описывающий распределение ам-
плитуд и фаз на элементах АС.
И в этих способах не учитываются погрешности значений коорди-
нат элементов и параметров АС: значения, измеренные с погрешно-
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 2 5


