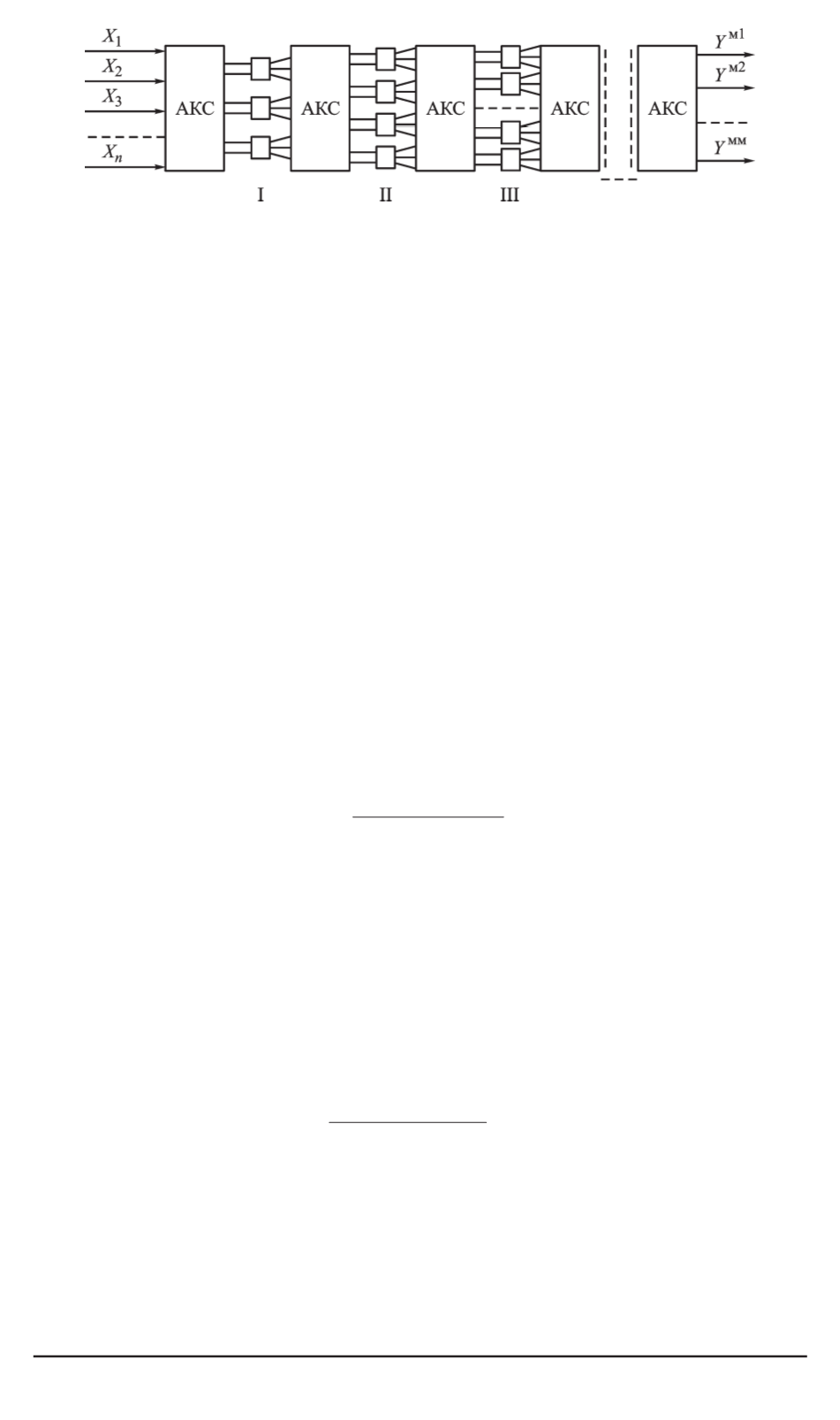
Рис. 3. Структура алгоритма самоорганизации
для конкретной задачи, а также реализации процесса искусственного
отбора моделей-претендентов осуществляется построение прогнози-
рующей модели оптимальной сложности. Построенные таким образом
модели могут прогнозировать будущее состояние управляемого объ-
екта и имеют хорошую помехоустойчивость. Структура алгоритма
самоорганизации показана на рис. 3, где введены следующие обо-
значения:
X
1
,
X
2
,
X
3
,. . . ,
X
n
— модели-претенденты, задаваемые
разработчиком на основе априорной информации или по результатам
предварительной обработки выборки наблюдений; I, II, III — блоки
усложнения моделей, которые генерируют новые промежуточные мо-
дели посредством перекрестной комбинации моделей-претендентов;
Y
м
1
,
Y
м
2
,
Y
мм
— модели, построенные после селекции посредством
АКС.
Критерий регулярности
Δ
2
(
B
)
определяет в основном среднеква-
дратическое отклонение значений реальных и значений, вычисляемых
с помощью моделей на проверочной выборке, т.е.
Δ
2
(
B
) =
t
∈
N
в
(
y
м
t
−
y
t
)
2
t
∈
N
y
2
t
→
min
,
(1)
где
y
t
— исходные данные выборки;
y
м
t
— значения, вычисляемые с
помощью моделей;
N, N
в
— полная и проверочная выборки соответ-
ственно.
Критерий минимума смещения
n
2
см
представляет собой значение
среднеквадратического отклонения выходов моделей
A, B
для всей
выборки и обозначает непротиворечивость моделей:
n
2
см
=
t
∈
N
(
y
A
t
−
y
B
t
)
2
t
∈
N
y
2
t
→
min
.
(2)
Выборка исходных данных делится на две одинаковые части
N
A
, N
B
, на которых соответственно определяются модели
A
и
B
с
выходами
y
A
t
,
y
B
t
и параметрами
C
A
i
,
C
B
i
.
В соответствии с теорией самоорганизации метод генерирования
последовательных комбинаций и отбора математических моделей при
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 3 59


