














 3 / 13
3 / 13

Д.Е. Супрун
88
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 5
Особой
, или
ключевой точкой
называют такую точку изображения, которая
с большей долей вероятности будет находиться на другом изображении того же
объекта.
Детектор
— метод извлечения особых точек из изображения, который дол-
жен обеспечивать инвариантность нахождения одних и тех же ключевых точек
относительно преобразований изображений. Детектор позволяет определить
координаты ключевых точек. Чтобы установить, какая ключевая точка одного
изображения соответствует ключевой точке другого изображения, необходимо
использовать дескриптор.
Дескриптор
— идентификатор ключевой точки, кото-
рый выделяет ее из множества остальных ключевых точек. Дескрипторы должны
обеспечивать инвариантность нахождения соответствия между ключевыми точ-
ками относительно преобразований изображений [3].
Следует отметить, что ключевые точки инвариантны относительно измене-
ния масштаба изображения и вращения, а также частично инвариантны к изме-
нению освещенности и 3D-точки зрения камеры. Такие точки применимы как в
пространственных, так и в частотных областях, снижая вероятность сбоев при
преобразованиях, помехах и шуме. Большое число характеристик может быть
извлечено из изображений с помощью эффективных алгоритмов. Кроме того,
характеристики имеют явные отличительные особенности, что позволяет с высо-
кой степенью вероятности вычислить отдельно взятую характеристику из боль-
шой базы данных характеристик для дальнейшего распознавания объектов или
сцен.
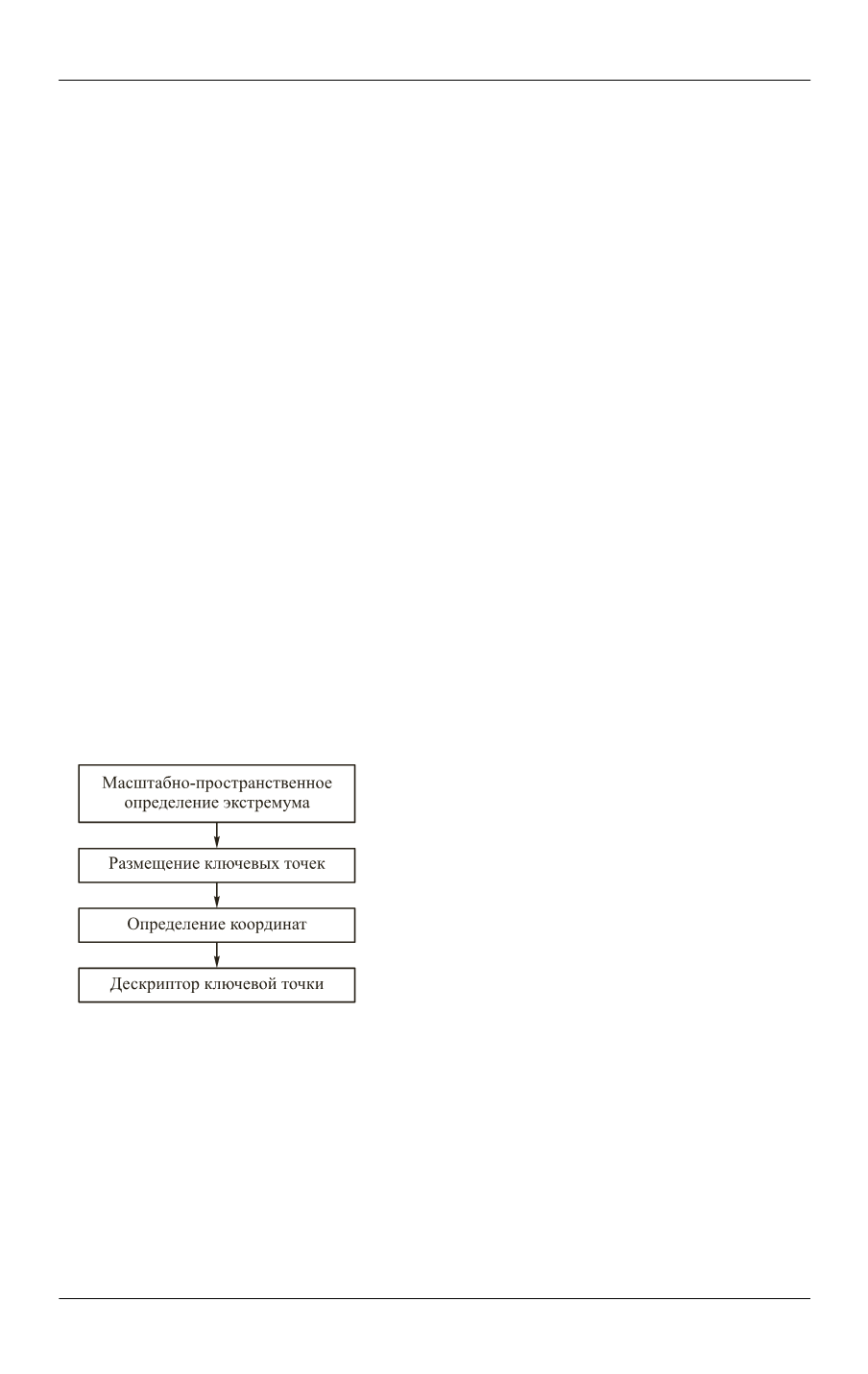
Далее рассмотрим основные этапы алгоритма, используемого для получения
характеристик изображения (рис. 2).
На первом этапе расчетов выполняют
анализ масштаба изображения и позиции.
Эффективность метода достигается исполь-
зованием функции разности гауссианов для
определения потенциально интересных то-
чек, инвариантных относительно масштаба
и ориентации. На втором этапе размещения
ключевых точек на каждом потенциальном
месте описывают детальную модель для
нахождения координат и масштаба. Ключе-
вые точки выбирают на основе их степени
стабильности. На третьем этапе одну или
более координат присваивают каждой клю-
чевой точке на основе локального направления градиента изображения. Все
дальнейшие этапы выполняют над данными изображения, которые были транс-
формированы в соответствии с заданными координатами, масштабом и местопо-
ложением каждой характеристики, тем самым обеспечивая инвариантность отно-
сительно этих преобразований. На четвертом этапе
измеряют локальные гра-
Рис. 2.
Основные этапы алгоритма,
используемого для получения
характеристик изображения