














 5 / 10
5 / 10

А.Ю. Гуменюк, А.Г. Зайцев, Д.А. Тимаков, А.П. Линкевичиус
30
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 5
ˆ
ˆ
,
1
1 ;
k k
k
V
AV
(8)
1
1
ˆ ,
1
ˆ
ˆ ,
1
,
1 ,
k k
k
k k
k k
V
V
V V
K
K
S
V
V
1
ˆ ,
1
,
1 ,
;
k k
k k
h
V V
R S
V
V
(9)
ˆ
ˆ
,
1
1
,
k k
k
η
V
V
V
K
AK
A R
(10)
где
1
N
n
n
k
k
Y Y
— вектор входного сигнала ФАР;
ˆ ,
k
V
ˆ ,
1
k k
V
—
текущая и экстраполированная оценки ВП
;
V
ˆ
,
k
V
K
ˆ ,
1
k k
V
K
— матрицы
дисперсии погрешностей фильтрации и экстраполяции;
,
h
R
η
V
R
— КМ шумов
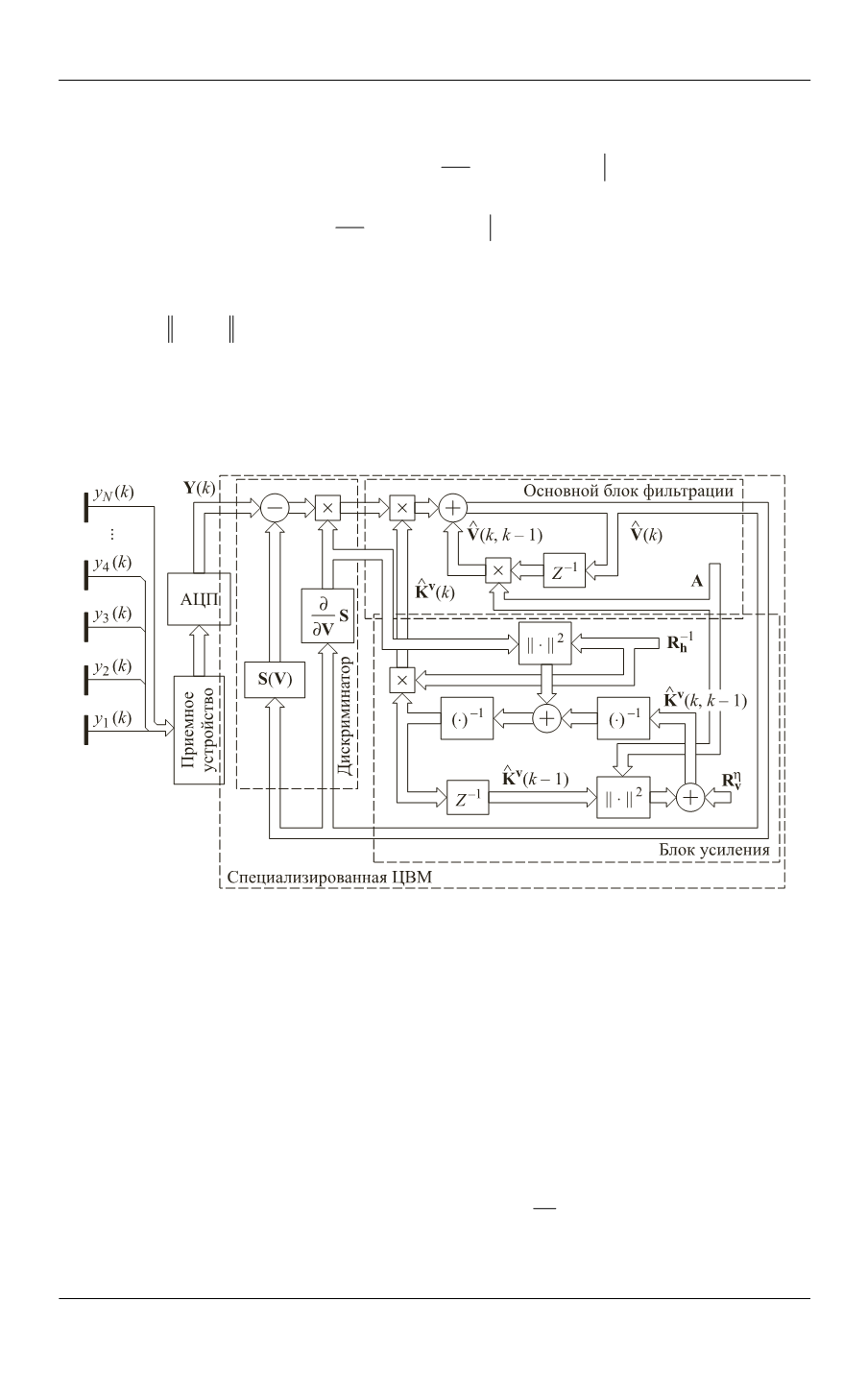
наблюдения и измерения. Структурная схема МЛ СФААР приведена на рис. 1.
Рис. 1.
Структурная схема МЛ СФААР
Для подтверждения работоспособности алгоритма (7)–(10) было проведено
имитационное моделирование (рис. 2). При моделировании полагалось, что
время наблюдения (время анализа) заданного углового сектора составляет
н
T
= 1 мс, в течение которого значения угловых координат ИИ существенно не
изменяются. Штриховыми линиями на рис. 2 показаны пеленги двух ИИ,
сплошными — процесс установления фаз первых трех компонент
1
,
v
2
,
v
3
v
вектора
,
V
пересчитанных в угловые направления. Смоделирована четы-
рехэлементная МЛ СФААР
(
N
= 4), когда ИИ расположены под углами
1
20 ,
2
35 ,
3
25
относительно нормали к ней, отношение сиг-
нал/шум (ОСШ) составляло
m
≈ 1,8…2,3 дБ,
1,3,
m
время корреляции сигна-
лов ИИ —
s
≈ 100 мс, интервал дискретизации входного сигнала —
t
=
8
10
с.