ний (6). Таким образом, квазирешение находится из условия
ρ R
mod
t
i
,
˜
X , R
meas
(
t
i
) = inf
X
2
M
ρ R
mod
t
i
, X , R
meas
(
t
i
)
,
(8)
где
ρ
(
R
1
, R
2
)
— расстояние между элементами
R
1
и
R
2
;
inf
X
2
M
ρ
—
точная нижняя граница величины
ρ
при различных значениях век-
тора параметров
X
, принадлежащих области
М
(области, ограничен-
ной значениями параметров
d
0
,
d
1
,
n
1
,
k
1
, определяемыми физическим
смыслом решаемой задачи).
Таким образом, задача подбора квазирешения системы уравнений
(6) может быть сведена к поиску минимума функции
E
(
d
0
, d
1
, n
1
, k
1
)
на некоторой ограниченной области значений параметров
d
0
,
d
1
,
n
1
,
k
1
, определяемой физическим смыслом решаемой задачи.
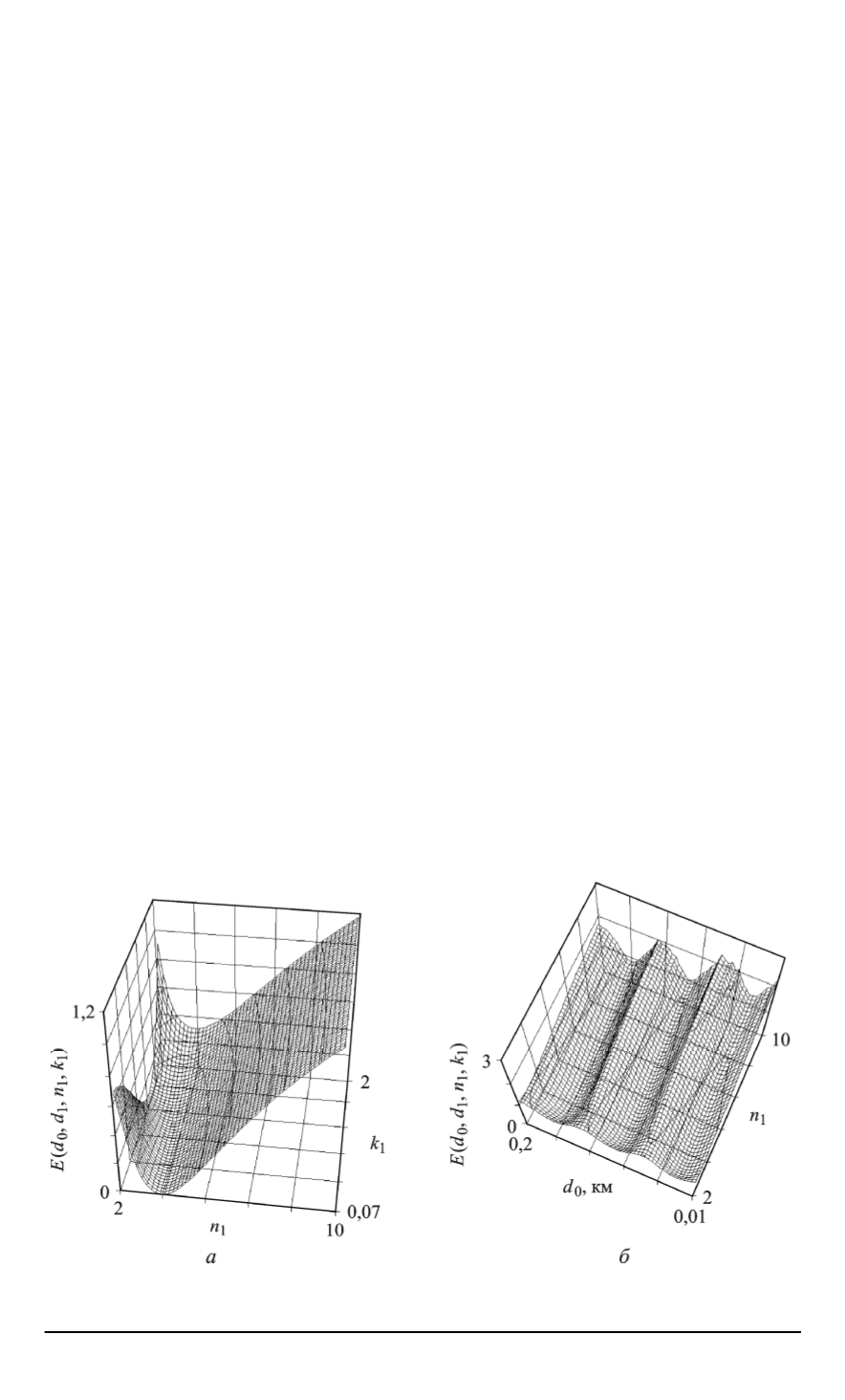
Вид функции невязки
E
(
d
0
, d
1
, n
1
, k
1
)
для
λ
= 0
,
532
мкм,
n
2
= 1
,
52
,
k
2
= 0
(подложка из стекла) показан на рис. 2,
а
при
d
0
= 0
,
1
мкм,
d
1
= 0
,
01
мкм/с, а на рис. 2,
б
— для
k
1
= 0
,
1
при
d
1
= 0
,
01
мкм/с.
Из рис. 2 следует, что функция невязки имеет сложный вид и на
области поиска она может иметь более одного локального минимума.
Для поиска глобального минимума в этом случае может быть исполь-
зован генетический алгоритм (ГА) [14, 15].
Генетические алгоритмы — это поисковые алгоритмы, позволяю-
щие с высокой эффективностью решать сложные оптимизационные
задачи. При построении данных алгоритмов для организации проце-
дур поиска оптимальных решений используется имитация механиз-
мов наследственности, размножения и естественного отбора, которым
подчиняется эволюционное развитие живых организмов на Земле, а
также применяются методы, аналогичные используемым в селекции и
генной инженерии.
Рис. 2. Функция невязки в координатах
n
1
,
k
1
(
а
) и
d
0
,
n
1
(
б
)
20 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 2


