соответствующее текущей моде генерации (например с правой круговой по-
ляризацией)
U
+
пк
. В момент переключения мод отключается автоматическая
регулировка периметра, инвертируется синхросигнал синхронного детектора
и через второй вход на пъезодвигателях устанавливается напряжение, соот-
ветствующее моде с левой круговой поляризацией
U
−
пк
=
U
+
пк
±
U
λ/
2
. Значение
полуволнового напряжения
U
λ/
2
измеряется при каждом переключении.
Через время, равное сумме постоянных времени транзисторного уси-
лителя напряжения, времени перезарядки емкости пъезокерамики, времени
задержки установления положения пъезокерамики относительно поданно-
го напряжения, автоматическая регулировка периметра вновь включается и
осуществляется дальнейшая достройка периметра на моду. Обычно данное
время близко к Т.
Описанное построение СРП позволяет обеспечить как устойчивость си-
стемы в режиме автоматического регулирования, так и относительно бы-
струю перестройку с моды на моду.
Дрейф зеемановского кольцевого лазера в “квазичетырехчастотном”
режиме работы.
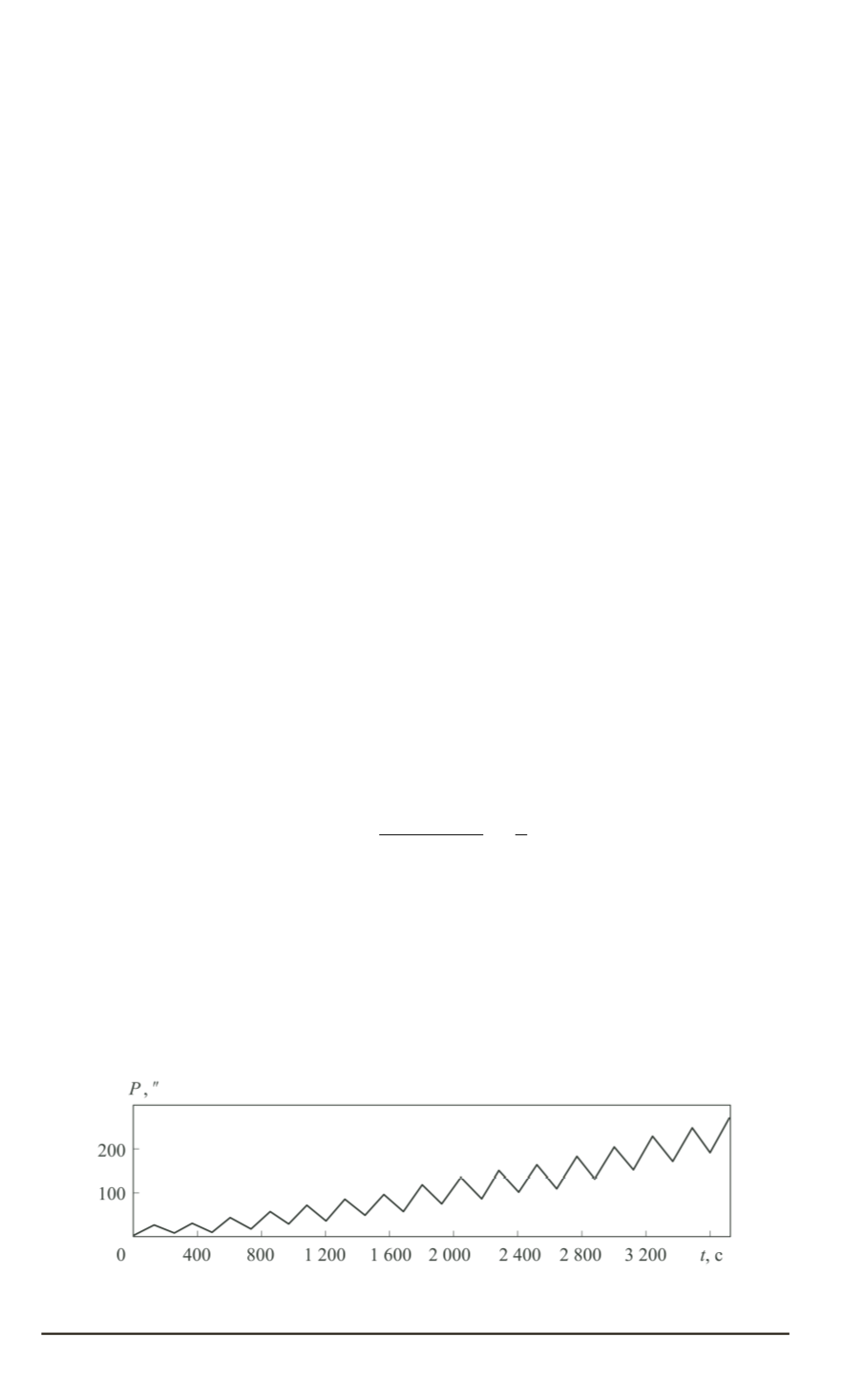
На рис. 3 приведена зависимость дрейфа ЗЛГ (т.е. ошибоч-
но накопленного угла кажущегося поворота
P
) от времени работы. Токовая
составляющая дрейфа проявляется в постоянном возрастании угла ошибки
со скоростью немагнитной составляющей дрейфа
Ω
g
нм
. Магнитная соста-
вляющая дрейфа приводит к появлению “пилы”, амплитуда которой равна
МТ
Ω
g
м
, где
М
— число периодов коммутации подставки между переключе-
ниями мод,
Ω
g
м
— магнитная составляющая дрейфа. В моменты переключе-
ния мод возникает дополнительная ошибка, связанная с не мгновенной пере-
стройкой лазера с одной моды на другую. Максимальная суммарная ошибка
Ω
g
в момент времени
t
равна
Ω
g
(
t
) = Ω
g
нм
(
t
) +
MT
Ω
g
м
(
t
)
t
+
1
t
n
X
i
=1
δP
max
.
(3)
Здесь
n
=
t/MT
— число переключений мод на интервале от 0 до
t
,
δP
max
—
максимальная угловая ошибка на каждом переключении. Значение
δP
max
за-
висит от применяемого алгоритма подмены информации на время отсутствия
двунаправленной генерации при смене мод.
Отметим, что изменение магнитного дрейфа приводит к возникновению
кажущегося дополнительного немагнитного дрейфа
Ω
g
нмп
, который равен
Рис. 3. Зависимость дрейфа ЗЛГ P от времени работы
14 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 2


