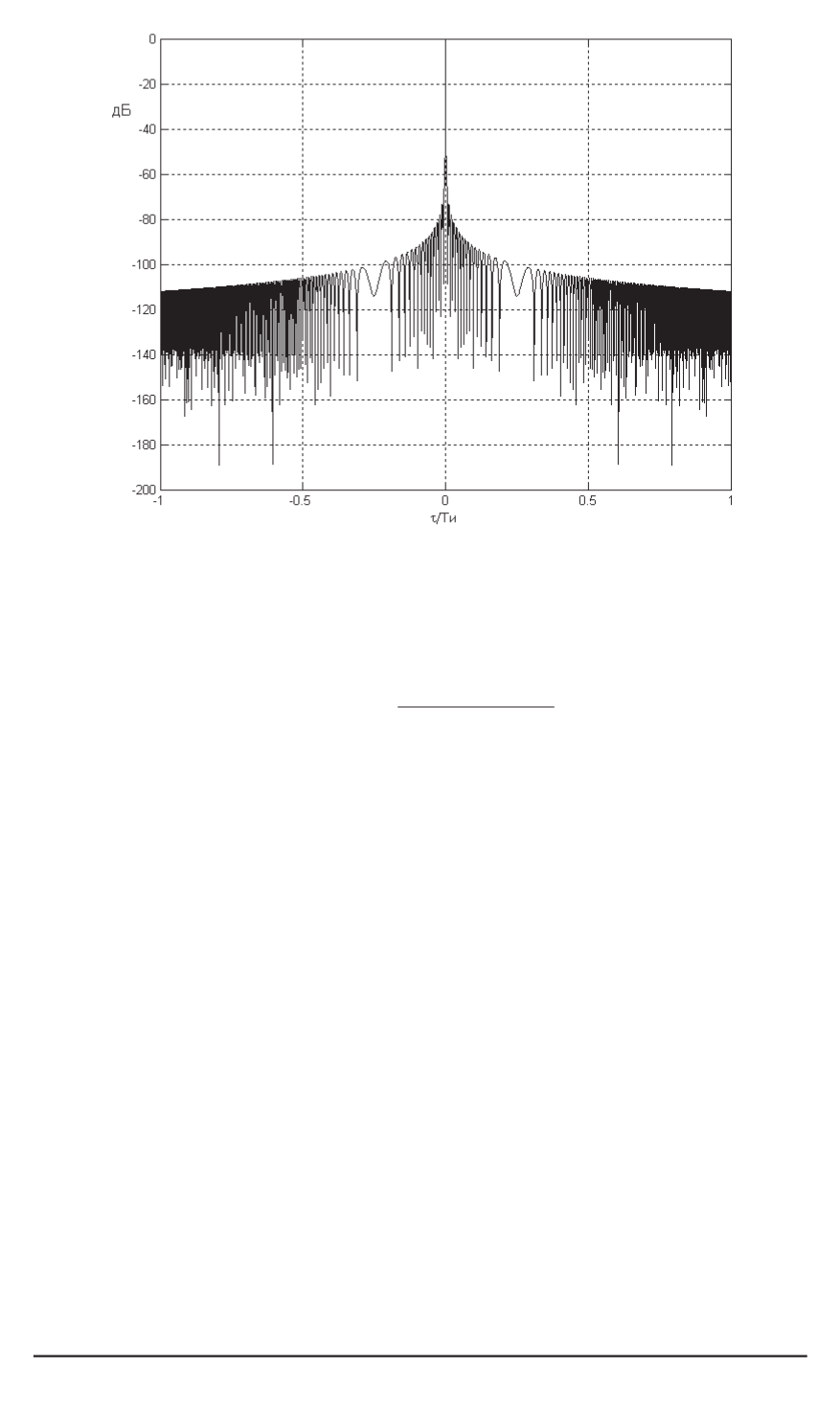
Рис. 3. Нормированная реакция оптимальной системы на мешающий ЛЧМ-
сигнал
зоной закрытия) определяется путем численного решения нелинейно-
го уравнения
|
χ
(
τ
)
|
2
=
(
d
−
1) (1 +
q
)
qd
(
при
d
= 2
|
χ
(
τ
)
|
2
= (1 +
q
)
/
(2
q
))
.
Далее приведены результаты расчетов указанных характеристик.
На рис. 3 изображена реакция оптимальной системы на мешающий
сигнал при ЛЧМ-модуляции и
q
= 60
дБ.
Из рис. 3 и 1 видно, что уровень боковых лепестков функции вза-
имной неопределенности находится ниже уровня – 70 дБ. Это говорит
о потенциальных возможностях алгоритма по уменьшению влияния
сигнала, находящегося в одном временном канале, на другие каналы.
На рис. 4,
а
показана реакция оптимальной системы на сумму
мешающего сигнала (
τ
=
τ
0
,
q
= 60
дБ) и произвольного сигнала
(
τ
=
τ
1
=
τ
0
+
T
и
/
2
,
q
= 40
дБ) при оптимизации системы лишь по
мешающему сигналу. Видно, что оптимизация системы по одному из
сигналов практически не влияет на прохождение второго сигнала (т.е.
обработка второго сигнала практически не отличается от согласован-
ной обработки). Это свойство позволяет надеяться, что оптимизируя
последовательно по сигналам сначала б´ольшего, а затем меньших
уровней, можно получить неискаженную информацию о наличии
отраженных сигналов.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3 115


