практике это уменьшает проблемы, связанные с пороговой обработ-
кой).
Приведем примеры, поясняющие суть проблемы и эффективность
оптимальной рассогласованной обработки.
Для определенности в качестве зондирующего сигнала рассмотрим
ЛЧМ-сигнал с функцией модуляции
S
(
t
) = exp
iπα
(
t
−
T
и
/
2)
2
,
0
≤
t
≤
T
и
,
(6)
где
T
и
— длительность импульса;
α
=
Fd/T
и
— крутизна “пилы” ЛЧМ-
сигнала (
Fd
— девиация частоты).
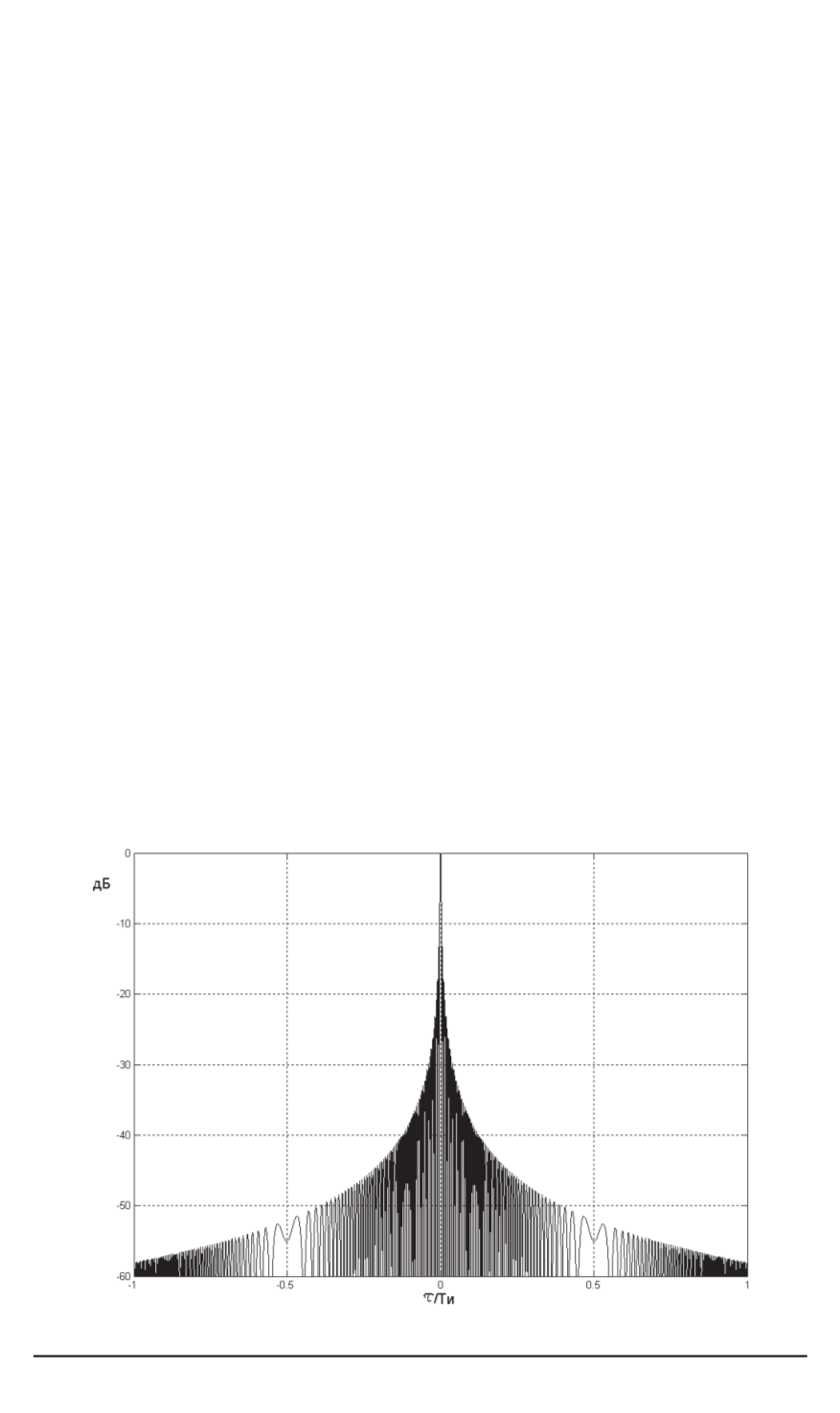
Главное временн´oе сечение функции неопределенности сигнала (6)
(см. рис. 1) определяется выражением
χ
(
x
) = (1
− |
x
|
) sin
c
[
πBx
(1
− |
x
|
)]
,
где
x
=
τ/T
и
(
|
x
| ≤
1
,
τ
— рассогласование по задержке);
sinc(
u
) =
= sin(
u
)
/u
;
B
=
αT
2
и
— база сигнала (
В
= 255
, см. рис. 1).
По оси абсцисс отложен параметр временной расстройки.
Далее рассмотрим лишь случай бистатической РЛС без запирания
(бланкирования) приемника на время излучения ЗС.
На рис. 2,
а
изображена нормированная зависимость мощности от
задержки суммы трех ЛЧМ-сигналов с шумом на выходе согласо-
ванной обработки по задержке (здесь и далее
В
= 255
). По гори-
зонтальной оси отложена задержка сигнала, выраженная в единицах
длительности интервала приема сигналов
T
п
.
Значения отношения сигнал/шум для трех сигналов составляют
соответственно 20, 40, 60 дБ; величины задержек случайны.
Рис. 1. Временное сечение функции неопределенности ЛЧМ-сигнала
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3 111


