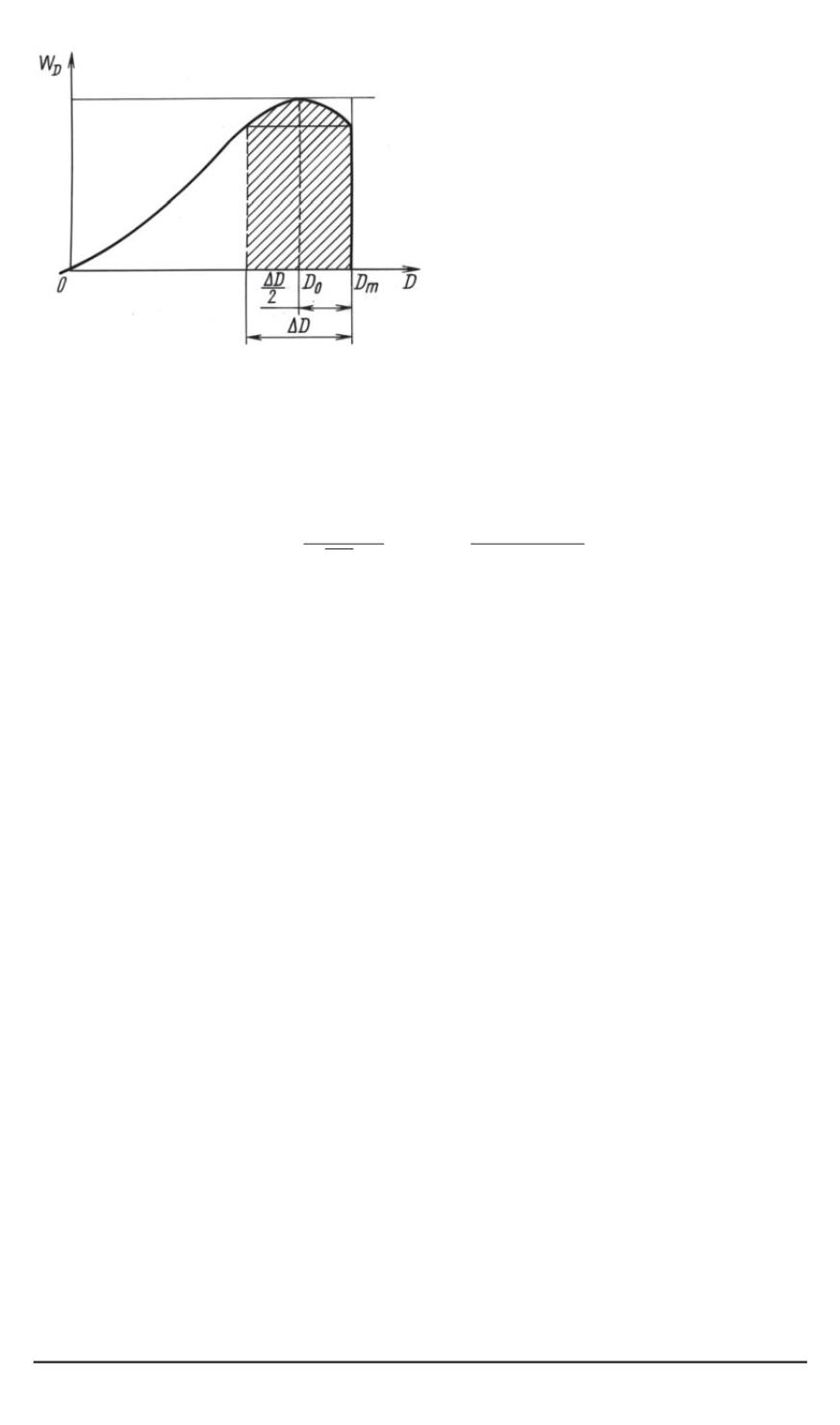
Рис. 2. Функция плотности распределе-
ния вероятности
При этом край функции
плотности распределения ве-
роятности нахождения ВЦ
на определенной дистанции
W
D
=
f
(
D
)
окажется на
D
m
:
D
m
=
D
0
+ 0
,
5 ˙
DN
к
Т
к
.
(35)
Эта зависимость приближен-
но учитывает потери рубежа об-
наружения на траекторный ана-
лиз (СДЦ, межкадровое накоп-
ление, а при
N
ц
>
1
и “мульти-
трекинг”).
Зависимость
W
D
=
f
(
D
)
показана на рис. 2.
Соответствующее аналитическое выражение может иметь вид
W
D
=
1
√
2
πσ
D
exp
−
( ˙
D
−
D
о
)
2
2
σ
2
D
;
(36)
здесь
σ
D
— СКО плотности распределения по
D
, которое, как показы-
вают грубые оценки, должно находиться в пределах
σ
D
= (0
,
3
. . .
0
,
5)
D
0
.
(37)
При этом учитывается приоритетность нахождения объекта в рай-
оне заштрихованного на рис. 2 интервала анализа (23), нахождение вне
которого может быть связано со временем кадра
Т
к
, в течение которо-
го объект мог извне войти в зону обзора. Более корректный учет этих
факторов требует проведения дополнительных исследований.
Условная приборная вероятность обнаружения цели с помощью ТП
Р
у
п.о
(28) определяется обратным по отношению к величине
q
в фoрму-
ле (6) соотношением, связывающим ее через значение сигнала с
D
пор
последующей цепочкой формул. Таким образом, задача замыкается,
но может быть решена только методом итераций.
При этом искомая (полная) вероятность обнаружения цели, играю-
щая роль аргумента критерия ТТП эффективности действий ТП, опре-
деляется следующим образом:
Р
апр
D
=
D
m
0
w
D
(
D
)
dD,
(38)
при этом
P
y
п.о
(
D
) =
∞
U
пор
U
(
D
)
du
;
(39)
72 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 2


