λ
(
θ
) = 2
θ
−
1
X
k
=
θ
−
N
g
r
(
k
)
∙
r
(
k
−
N
FFT
)
−
−
ρ
θ
−
1
X
k
=
θ
−
N
g
(
|
r
(
k
)
|
2
+
|
r
(
k
−
N
FFT
)
|
2
)
, ρ
=
q
q
+ 1
,
где
q
— отношение сигнал/шум (ОСШ).
Экспериментальные исследования показывают, что поиск экстре-
мума корреляционной функции дает менее высокую точность синхро-
низации по сравнению с оптимальным алгоритмом. Вместе с тем он
не требует дополнительной оценки ОСШ, и, таким образом, являет-
ся более простым в реализации. При моделировании алгоритмов были
рассмотрены случаи использования как обычного, так и знакового кор-
реляторов. В последнем случае для оценки частотного рассогласова-
ния использовалось значение корреляционной функции, вычисленное
непосредственно согласно выражению (5) без знакового преобразова-
ния, так как последнее приводит к смещению полученной оценки.
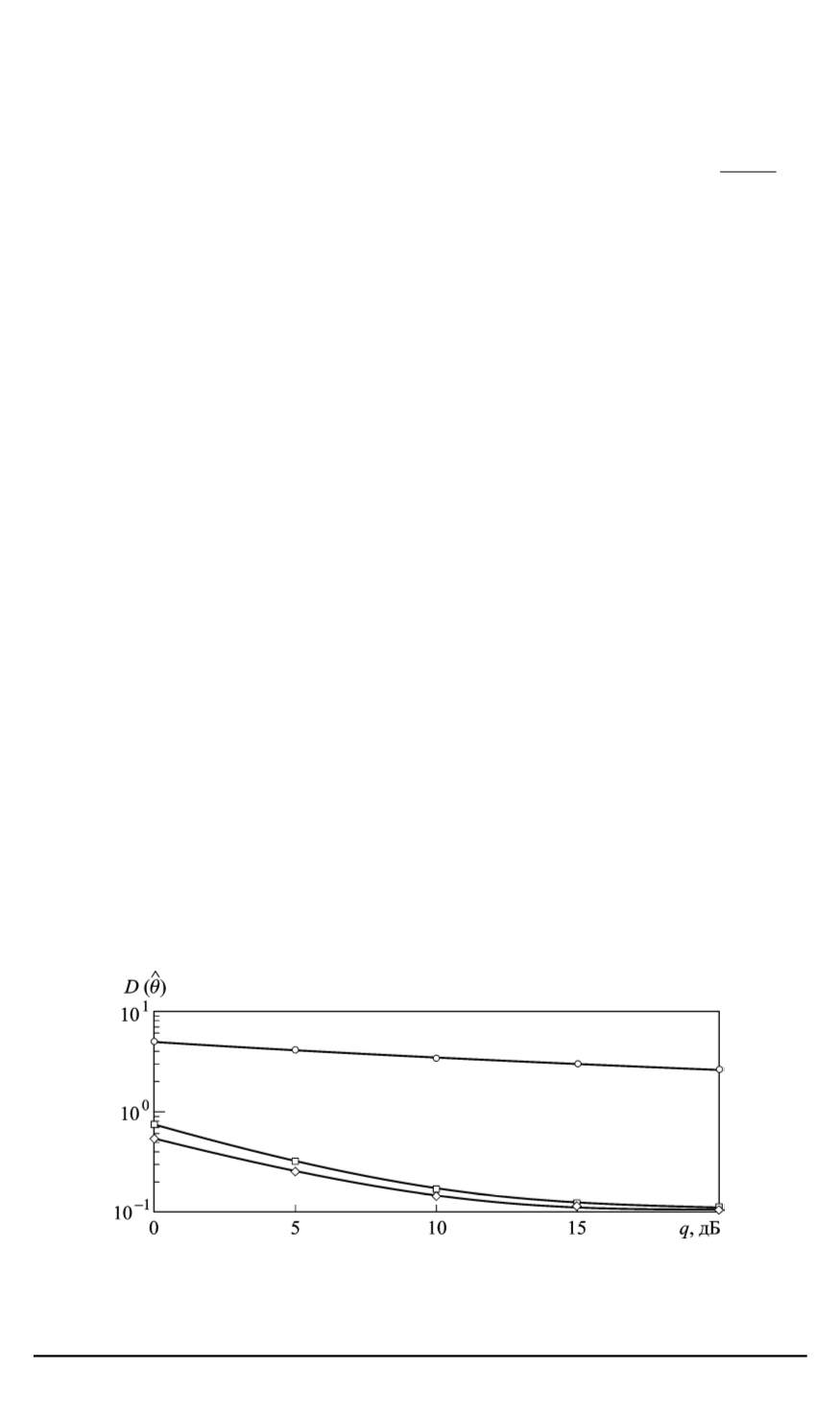
На рис. 2 приведены экспериментальные зависимости дисперсии
оценки временн´oго рассогласования от ОСШ при применении обыч-
ного и знакового корреляторов, а также оптимального алгоритма [2].
При моделировании здесь и далее рассматривалась система, функци-
онирующая в стандарте европейского наземного телевизионного ве-
щания DVB-t [6]. Параметры модельного сигнала: режим передачи
8
k
, относительная длительность защитного интервала 1/4, модуляция
поднесущих — QPSK.
Результаты моделирования показывают, что применение знакового
коррелятора позволяет добиться точности синхронизации, сравнимой
с точностью оптимального алгоритма, и, таким образом, его приме-
нение является предпочтительным для оценки начала OFDM-символа
во временн´oй области.
Рис. 2. Экспериментальные зависимости дисперсии оценки временн ´oго рассо-
гласования от ОСШ при применении обычного (
◦
)
и знакового ( ) коррелято-
ров, а также оптимального алгоритма (
♦
) [2]
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 1 21


