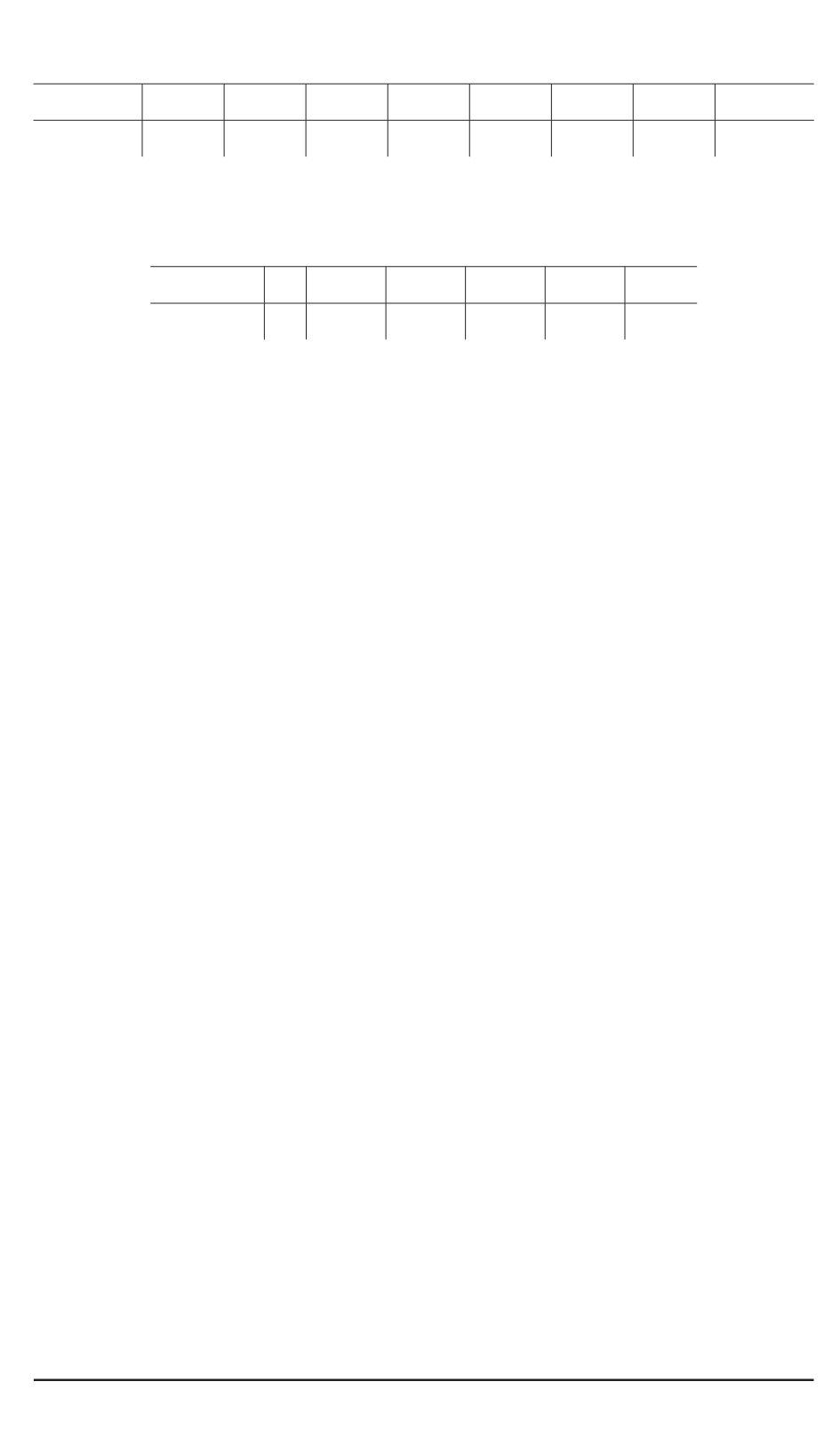
Таблица 1
C
п
, пФ 0
5
10
15
20
25
30
50
k
(1)
д1
, B 3,24 2,90 2,60 2,33 2,10 1,91 1,73 1,22
Таблица 2
Δ
C
п
, пФ 0 2
4
6
8
10
u
(1)
д0
, B 0 0,065 0,127 0,186 0,243 0,298
Так, при
C
п1
= 20
пФ,
C
п2
= 10
пФ (
Δ
C
п
= 10
пФ) крутизна дат-
чика в соответствии с выражениями (10) и (11) составит
k
(
1
)
д1
= 2
,
35
В,
что при
u
(1)
д0
= 0
,
298
В и
h
= 50
мкм эквивалентно смещению элек-
трического нуля датчика из центра подвеса на 6,4 мкм, т.е. на 1 пФ
рассогласования паразитных емкостей приходится примерно 0,64 мкм
смещения электрического нуля датчика.
Следовательно, для совпадения электрического нуля датчика с гео-
метрическим центром подвеса необходима дополнительная симметри-
рия плеч датчика по паразитным емкостям.
Для остальных каналов подвеса получим
u
д3
=
u
(
3
)
д0
+
k
(
3
)
д1
¯
x
+
k
(
3
)
д2
¯
β
;
u
д5
=
u
(
5
)
д0
+
k
(
5
)
д1
¯
y
+
k
(
5
)
д2
¯
α
;
u
д7
=
u
(
7
)
д0
+
k
(
7
)
д1
¯
x
−
k
(
7
)
д2
¯
β,
где
u
(
i
)
д0
,
k
(
i
)
д1
,
k
(
i
)
д2
при
i
= 3
,
5
,
7
вычисляются аналогично
u
(1)
д0
,
k
(1)
д1
,
k
(1)
д2
только при своих значениях паразитных емкостей.
В осевом канале (электроды э9 и э10, см. рис. 5) собственные ко-
эффициенты электростатической индукции, полученные в работе [3],
имеют вид
C
99
=
C
(0)
99
+
C
¯
z
99
¯
z
+
C
¯
z
2
99
¯
z
2
;
C
1010
=
C
(0)
99
−
C
¯
z
99
¯
z
+
C
¯
z
2
99
¯
z
2
,
поэтому сигнал датчика содержит только составляющую от нормиро-
ванного перемещения по оси
z
:
u
д9
=
u
(
9
)
д0
−
C
(0)
99
C
¯
z
99
u
(
9
)
д1
¯
z
=
u
(
9
)
д0
−
k
д3
¯
z
;
k
д3
=
C
(0)
99
C
¯
z
99
u
(
9
)
д1
,
(12)
где напряжение
u
(
9
)
д0
может быть получено из
u
(
1
)
д0
, а
u
(
9
)
д1
— из
u
(
1
)
д1
заменой
C
(0)
11
на
C
(0)
99
и
C
п1
,
C
п2
на
C
п9
,
C
п10
соответственно.
В дальнейших расчетах будем считать каналы симметричными, т.е.
u
(
i
)
д0
= 0
,
i
= 1
,
3
,
5
,
7
,
9
, а также, что паразитные емкости всех плеч
78 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 2


