Таким образом, выходное напряжение с измерителя определяется
значением измеряемого угла наклона (
α, β
).
Измеряемые углы вычисляются по следующим выражениям:
α
= arcsin
U
ax
K
d
g
;
β
= arcsin
U
ay
K
d
g
.
Для этого в микропроцессоре выполняются следующие математи-
ческие операции:
α
= arcsin
U
α
K
d
K
ax
g
;
β
= arcsin
U
β
K
d
K
ay
g
.
Для повышения точности определения углов, лежащих в пределах
от
45
◦
до
90
◦
, используются следующие выражения:
sin
α
=
U
α
K
d
K
ax
g
; sin
β
=
U
β
K
d
K
ay
g
;
α
= arccos 1
−
sin
2
α
;
β
= arccos 1
−
sin
2
β.
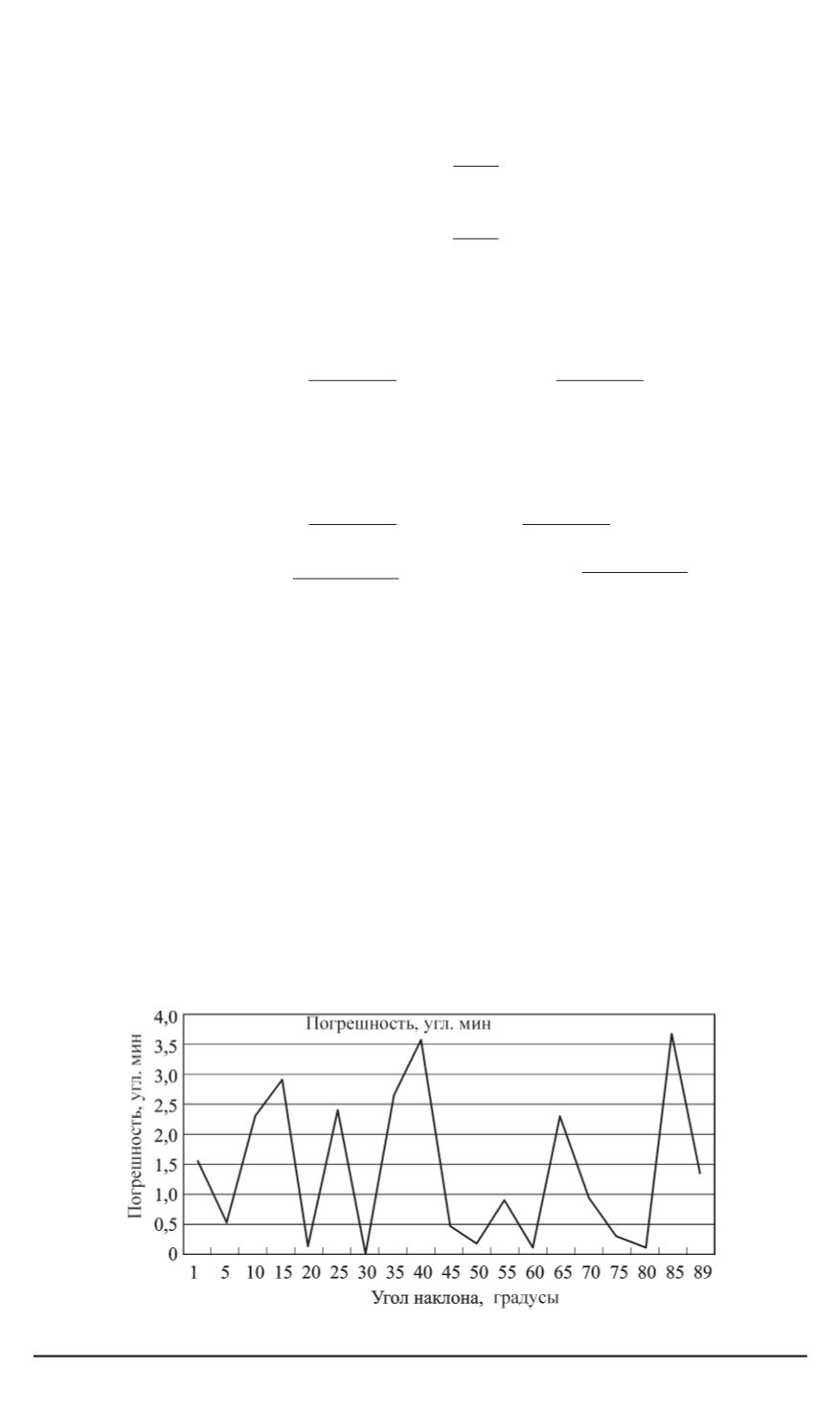
Расчет проводили, вычисляя функции
arcsin(
. . .
)
разложением их
в ряд. В расчетах значений ряда учитывался 21 член включитель-
но. Значения углов наклона в диапазоне менее
±
45
◦
вычисляли по
sin(
. . .
)
, более
±
45
◦
— по
cos(
. . .
)
. Результаты расчета погрешности
определения углов системы позиционирования в диапазоне от 0 до
90
◦
приведены на рис. 4.
При использовании двухкоординатного измерителя прибор имеет
два выхода; напряжения на этих выходах изменяются независимо друг
от друга, но зависят от наклона измерителя относительно одной или
другой оси или одновременно относительно обеих. При этом способе
измерения линейного ускорения достаточно двух измерителей вместо
Рис. 4. Расчет погрешности определения углов системы позиционирования
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 4 61


