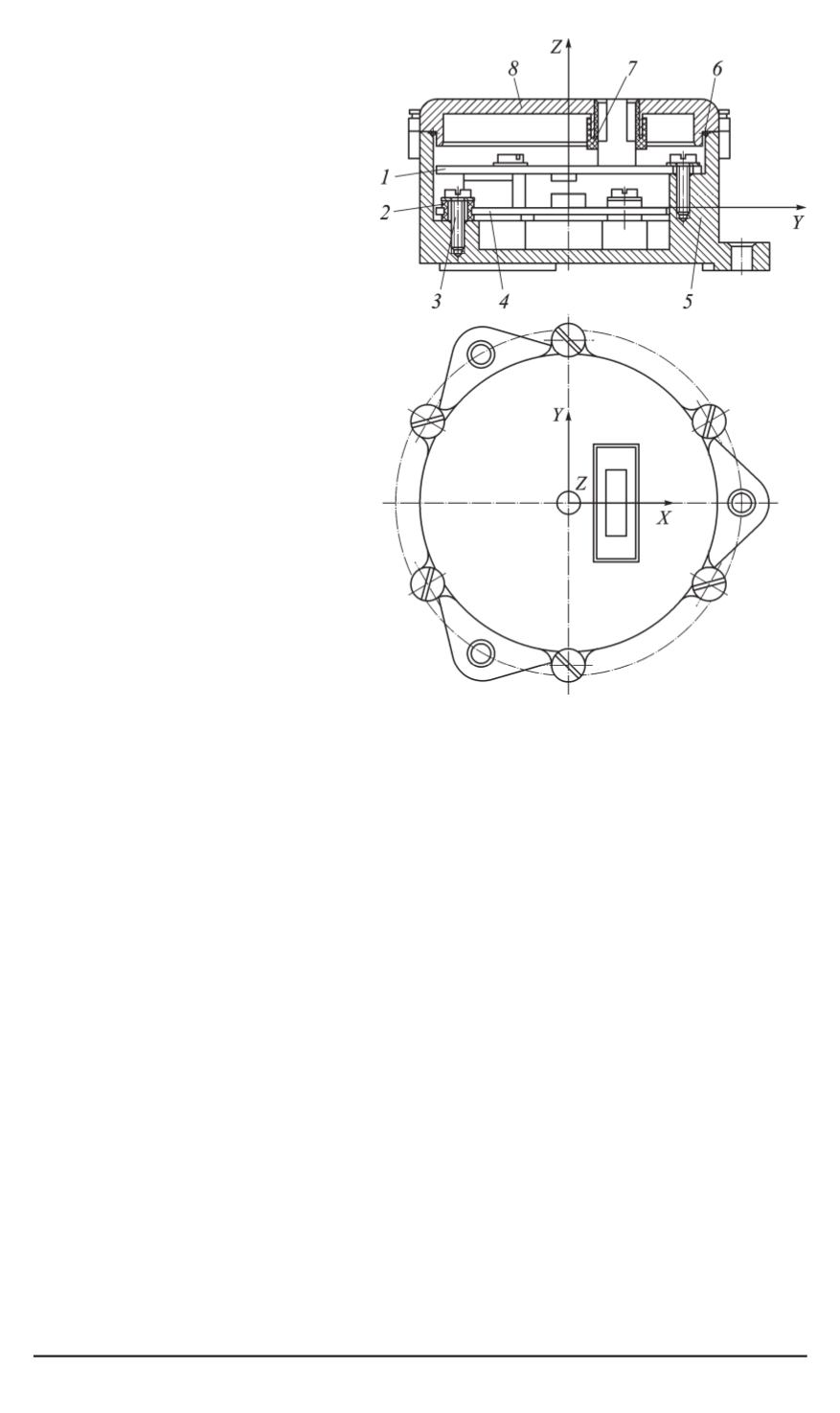
Рис. 2. Унифицированная система позицио-
нирования
ускорения свободного паде-
ния с индикацией получен-
ного сигнала в цифровом ви-
де [2].
Схема построения систем
позиционирования на осно-
ве двух ММА приведена на
рис. 2. Система содержит две
платы: блок интерфейса (со-
пряжения)
1
и модуль по-
зиционирования
4
, устано-
вленные в корпусе
5
, вы-
полненном из сплава алю-
миния. Плата модуля пози-
ционирования
4
установле-
на на компенсаторах темпера-
турных деформаций
2
внутри
корпуса
5
и закреплена с по-
мощью винтов
3
. На внешней
поверхности платы сопряже-
ния
4
установлен электриче-
ский разъем
7
. Корпус
5
за-
крыт крышкой
8
с резиновой
прокладкой
6
. Системы пози-
ционирования УФСП-2 и УФСП-3 отличаются модулями позициони-
рования
4
.
Системы позиционирования в зависимости от назначения име-
ют разные диапазоны измерения параметров. Для каждого диапазо-
на углов, линейных ускорений и угловых скоростей измерители из-
готовляются отдельно. Чтобы обеспечить унификацию измерителей и
повысить точность измерений углов в диапазоне, менее
90
◦
, вводят по-
правку. В состав платы модуля позиционирования
4
(см. рис. 2) входят
(рис. 3) последовательно соединенные двухкоординатный измеритель
ускорения
1
, выполненный на основе ММА, блок операционных уси-
лителей
2
, микроконтроллер (МК)
3
, блок интерфейса
4
. Блок
2
состо-
ит из операционных усилителей, в обратную связь которых включены
электронные потенциометры.
Первый выход (
U
ax
) двухкоординатного измерителя ускорения
1
соединен с первым входом блока операционных усилителей
2
. Вто-
рой выход (
U
ay
) двухкоординатного измерителя ускорения соединен
со вторым входом блока операционных усилителей, первый выход
(
U
α
) которого соединен с первым входом микроконтроллера
3
, а его
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 4 59


