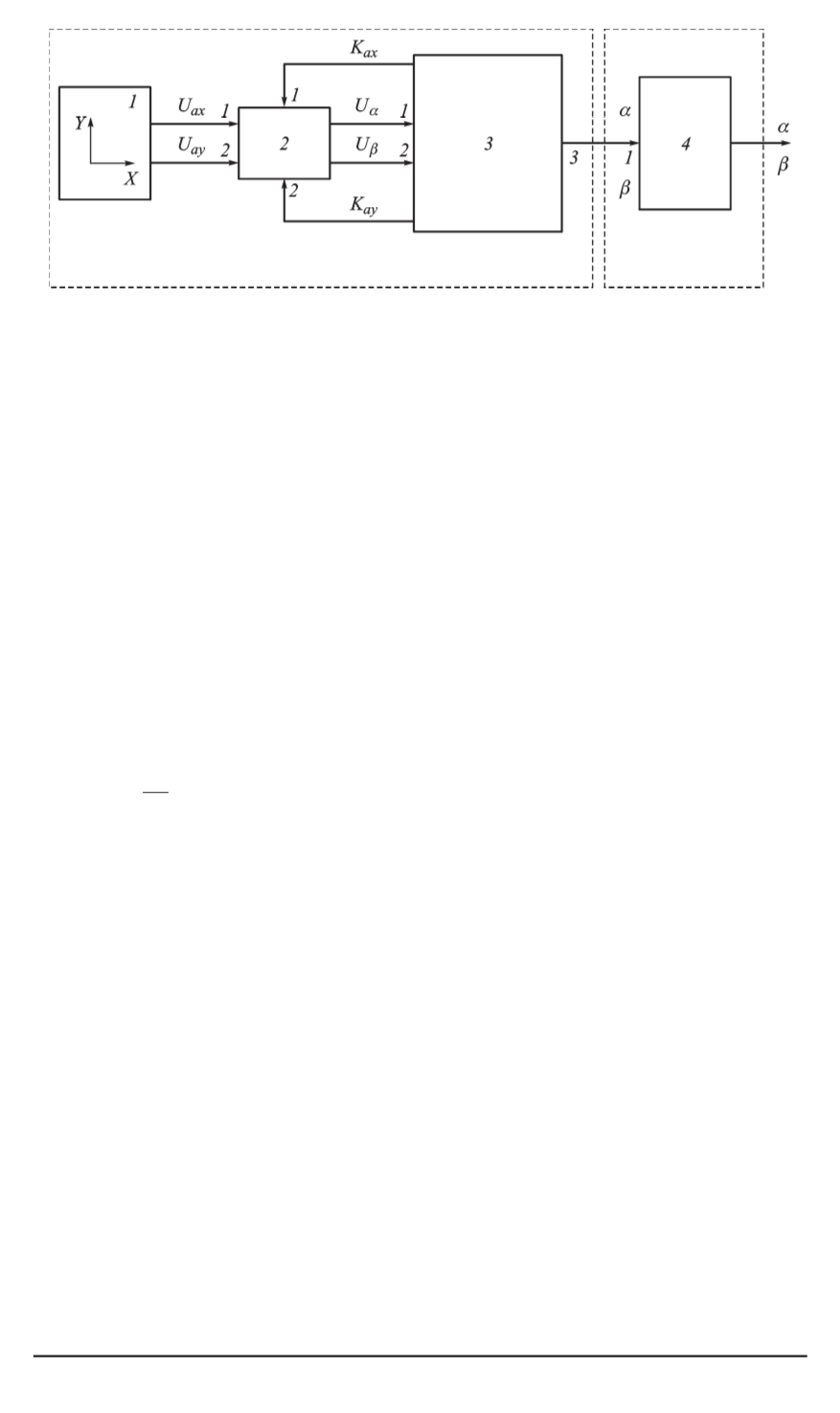
Рис. 3. Блок-схема системы позиционирования с двумя ММА
первый выход МК
3
(
K
ax
) соединен с первым входом блока опера-
ционных усилителей
2
. Причем первым входом блока операционных
усилителей
2
является вход блока электронных потенциометров. Вто-
рой выход (
U
β
) блока операционных усилителей
2
соединен со вторым
входом микроконтроллера
3
, второй выход (
K
ay
) которого соединен со
вторым входом блока операционных усилителей. Третий выход микро-
контроллера
3
соединен с входом-выходом блока интерфейса
4
.
Система позиционирования работает следующим образом. Сигна-
лы
U
ax
и
U
ay
с выхода ММА поступают на соответствующие входы
блока операционных усилителей, где усиливаются и на выходе вычи-
сляются по формулам:
U
α
=
K
d
U
ax
;
U
β
=
K
d
U
ay
,
где
K
d
=
90
D
и
0
< D
90
.
С выходов блока операционных усилителей сигналы
U
α
и
U
β
по-
ступают на входы микроконтроллера
3
, где по приведенным формулам
определяются углы
α
и
β
. Величина
К
d
определяется значением сиг-
нала, поступающего с микроконтроллера на электронные потенциоме-
тры блока операционных усилителей
2
.
Способ измерения углов позиционирования заключается в следую-
щем. Двухкоординатный измеритель
1
ускорения свободного падения
выдает напряжения
U
a
х
,
U
ay
, пропорциональные проекции ускорения
на соответствующую ось, которая, в свою очередь, зависит от по-
ложения корпуса измерителя и определяется углами наклона
α, β
к
горизонту по соотношениям:
U
ax
=
K
ax
g
sin
α
;
U
ay
=
K
ay
g
sin
β,
где
g
— ускорение свободного падения, м/с
2
;
U
ax
, U
ay
— напряжения,
снимаемые с ММА по соответствующим осям, В;
K
ax
,
K
ay
— мас-
штабные коэффициент ММА, В
·
с
2
/м.
60 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 4


