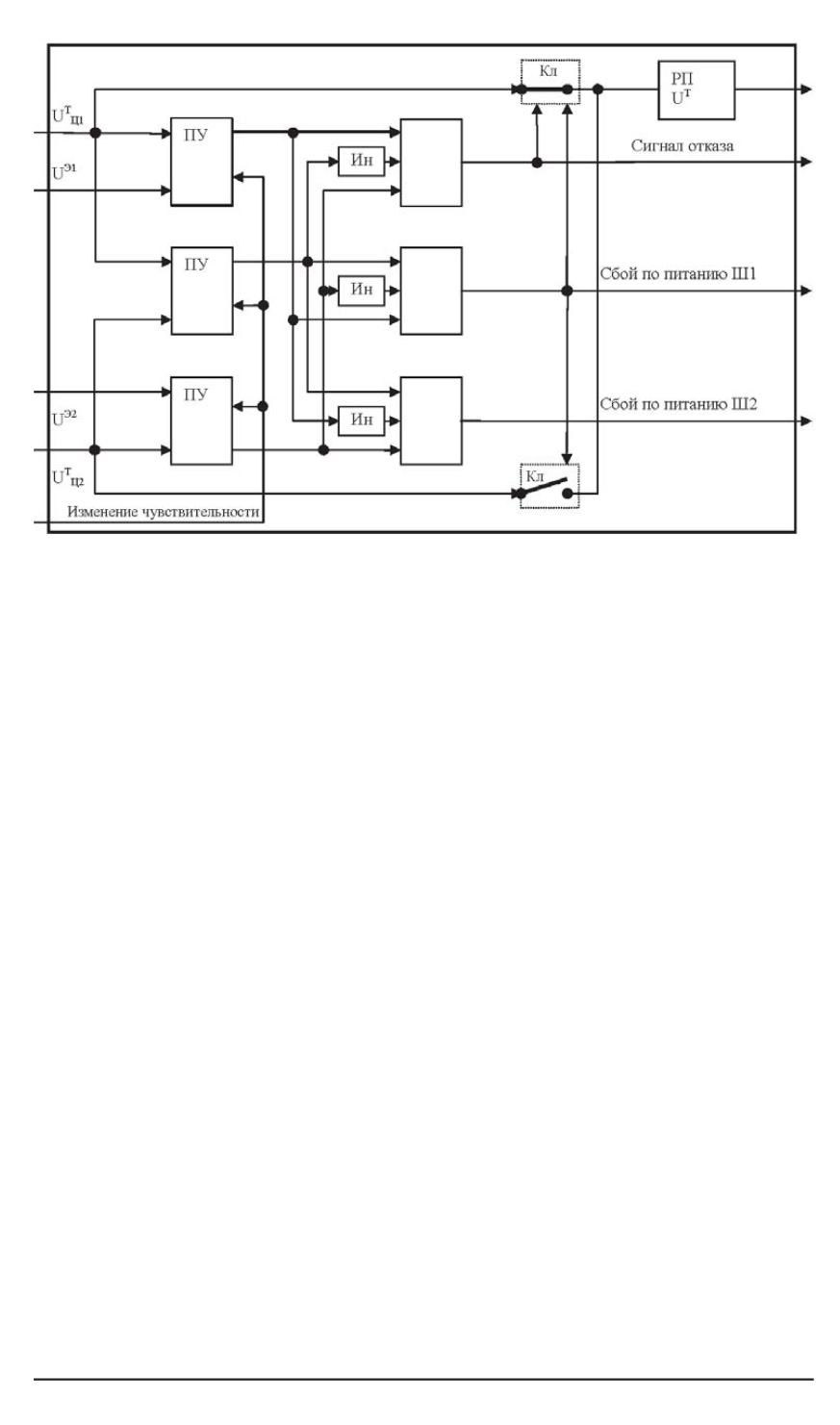
Рис. 4. Блок контроля:
ПУ — пороговое устройство; Ин — инвертирующее устройство; & — логическая
схема И, РП — регистр памяти
друга шинам (Ш1 и Ш2), поэтому каждое реальное устройство целесо-
образно резервировать двумя виртуальными агрегатами, подключен-
ными к отдельным шинам электропитания. Также целесообразно па-
раллельно дважды оцифровывать сигнал
U
Т
. В итоге, в каждыймо-
мент времени существуют один реальныйвыходнойсигнал, дважды
оцифрованный(
U
T
Ц
1
и
U
T
Ц
2
), а также два предсказанных сигнала
U
Э
Ц
1
и
U
Э
Ц
2
, сравнивая которые в блоке контроля (рис. 4), можно однознач-
но определить момент отказа реального агрегата, а также моменты
“пропадания” электропитания.
Выход из строя последовательно одного за другим виртуальных
агрегатов — событие маловероятное. Схемные решения устройств
сравнения и контроля достаточно отработаны и могут быть перенесе-
ны на элементную базу микроэлектроники с учетом того, что только
один сигнал является реальным и выходным может быть только он,
либо никакой.
При сравнении четырех сигналов между собойвозможна установка
шести пороговых устройств (ПУ), сравнивающих попарно значения:
ПУ1 — [
U
Т
Ц
1
и
U
Э
Ц
1
], ПУ2 — [
U
Т
Ц
1
и
U
Э
Ц
2
], ПУ3 — [
U
Т
Ц
1
и
U
Т
Ц
2
],
ПУ4 — [
U
Э
Ц
1
и
U
Э
Ц
2
], ПУ5 — [
U
Э
Ц
1
и
U
Т
Ц
2
], ПУ6 — [
U
Э
Ц
2
и
U
Т
Ц
2
].
Результат работы ПУ — “0”, если значения сигналов равны (с точ-
ностью до допустимойошибки), и “1”, если их значения различаются.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 1 121


