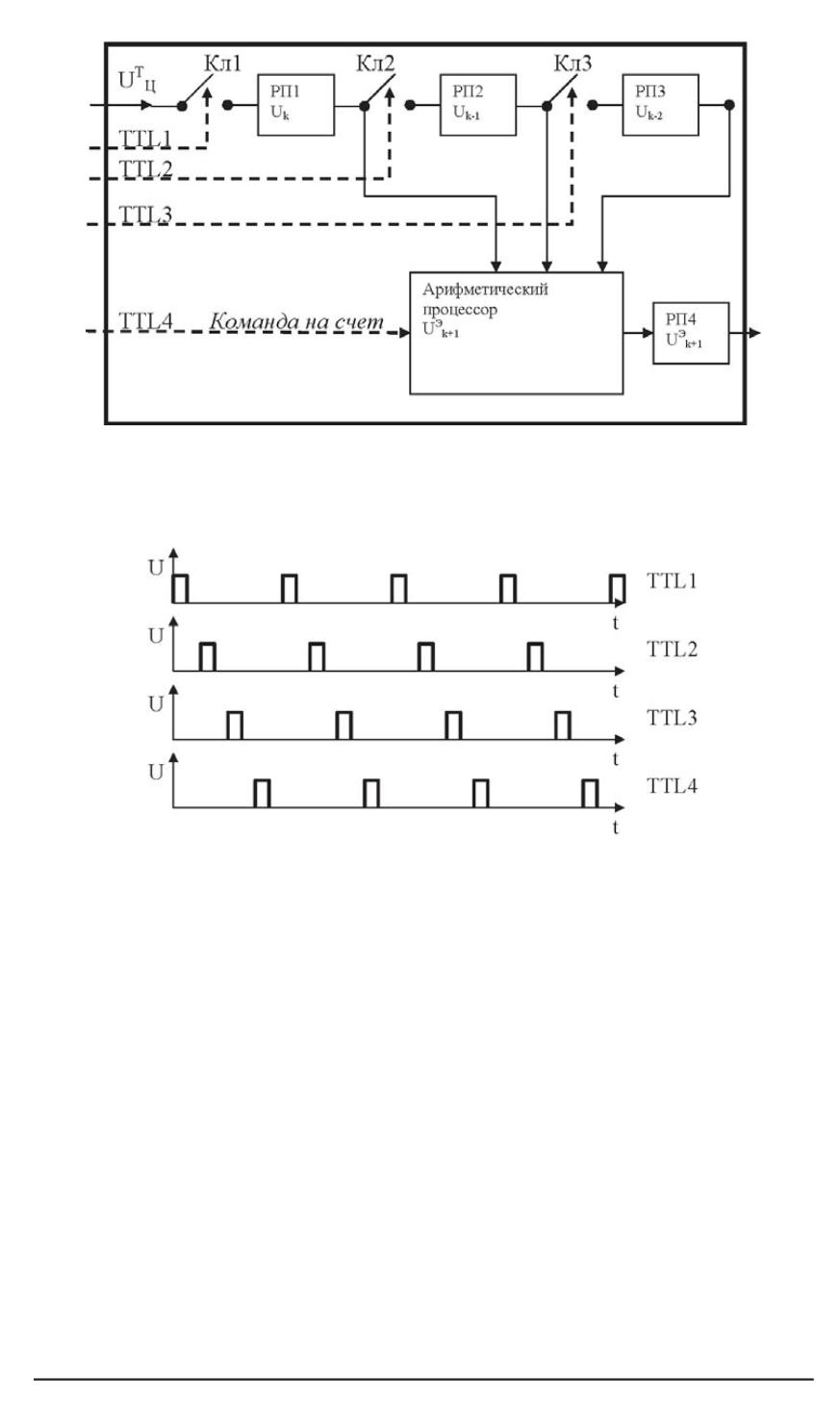
Рис. 2. Функциональная схема виртуального агрегата:
РП1, РП2, РП3, РП4 — регистры памяти; Кл1, Кл2, Кл3 — электронные ключи; TTL1,
TTL2, TTL3, TTL4 — тактирующие сигналы
Рис. 3.
Временная диаграмма тактирующих сигналов
ющие временнойрезерв, но сдвинутые относительно друг друга во
времени (рис. 3).
Рабочийцикл начинается с последовательного приема схемойтак-
тирующих сигналов TTL1, TTL2, TTL3, которые управляют ключа-
ми Кл3, Кл2, Кл1. В результате этого по очереди в запоминающие
устройства — регистры памяти РП3, РП2, РП1 — заносятся текущие
(для моментов времени
t
k
−
2
,
t
k
−
1
,
t
k
) значения выходного сигнала с
контролируемого агрегата:
U
k
−
2
,
U
k
−
1
,
U
k
. Далее тактирующийсигнал
TTL4 выдает команду “Старт” счета в “Арифметическом процессоре”
экстраполированного значения
U
Э
k
+1
выходного сигнала контролируе-
мого агрегата для момента времени
t
k
+1
, которое заносится в регистр
памяти РП4 для считывания и хранится до следующего акта счета.
Далее схема работает по новому циклу.
Подача электропитания на борту современных летательных аппа-
ратов к потребителям осуществляется по двум резервирующим друг
120 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 1


