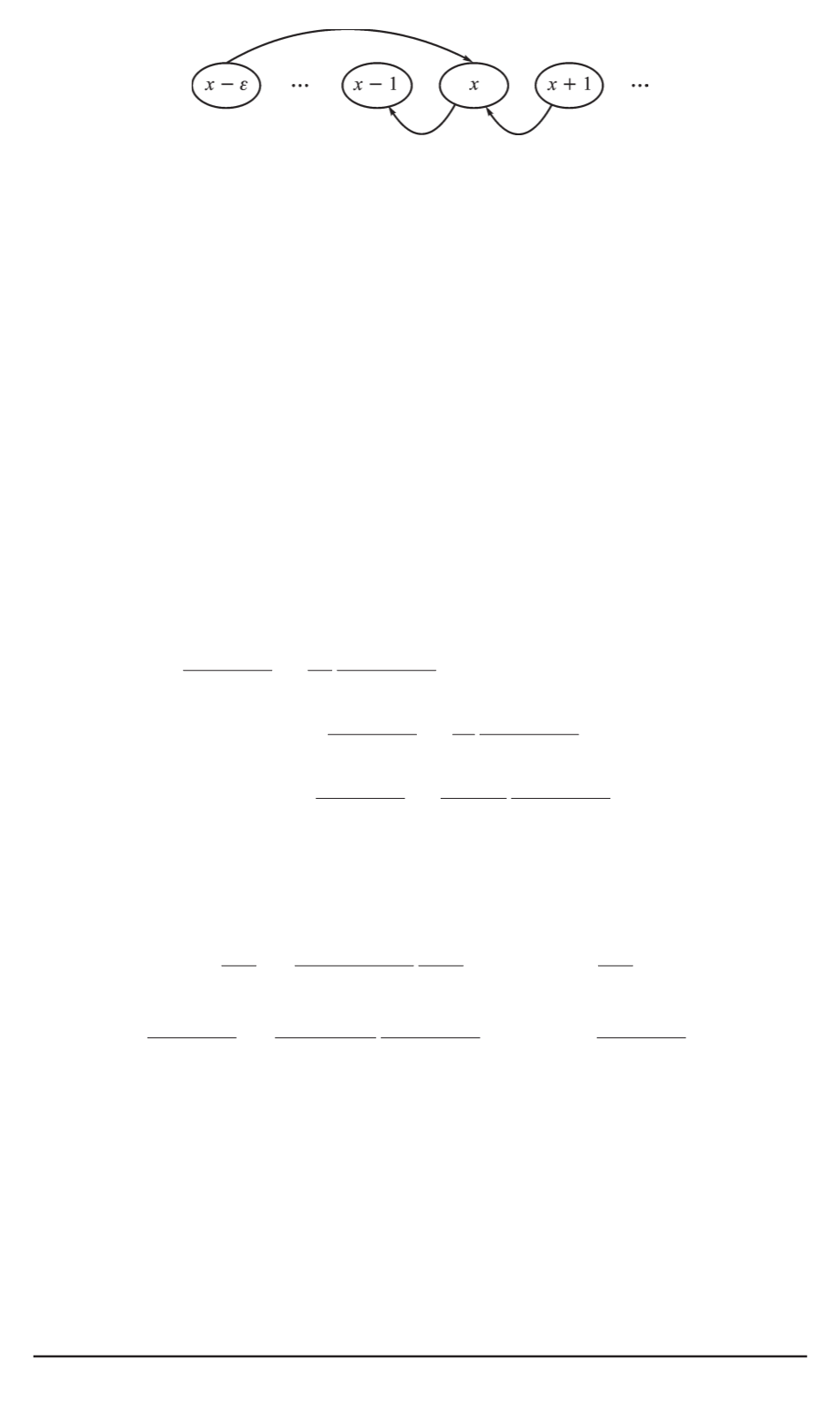
Рис. 1. Схема возможных переходов между состояниями
i
-гоузла на (
h
+ 1
)-м
шаге
может переходить в одно из состояний, задаваемых числом заявок
k
,
находящихся в узле.
Пусть после
h
шагов работы
P
x
−
ε,h
есть вероятность того, что в
выбранном
i
-м узле находится
x
−
ε
заявок;
P
x,h
и
P
x
+1
,h
— вероятности
того, что в нем находится
x
заявок и
x
+1
заявка. На одном шаге в узел
может поступить некоторое число заявок, тогда
P
x,h
+1
— вероятность
того, что на (
h
+1
)-м шаге в
i
-м узле будет находиться некоторое число
заявок
x
(рис. 1), можно определить как
P
x,h
+1
=
P
x
−
ε,h
+
P
x
+1
,h
−
P
x,h
,
введем
t
=
hτ
0
, где
t
— время работыузла, тогда
P
(
x, t
+
τ
0
) =
P
(
x
−
ε, t
) +
P
(
x
+
τ
0
λ, t
)
−
P
(
x, t
)
.
(1)
Раскладывая функцию (1) в ряд Тейлора, получаем
P
(
x, t
) +
τ
0
∂P
(
x, t
)
∂t
+
τ
2
0
2
∂
2
P
(
x, t
)
∂t
2
+
. . .
=
=
P
(
x, t
)
−
ε
∂P
(
x, t
)
∂x
+
ε
2
2
∂
2
P
(
x, t
)
∂x
2
−
. . .
+
+
P
(
x, t
) +
τ
0
λ
∂P
(
x, t
)
∂x
+
(
τ
0
λ
)
2
2
∂
2
P
(
x, t
)
∂x
2
+
. . .
−
P
(
x, t
)
.
Учитывая в левой части члены, содержащие не более чем первую
производную по
t
, а в правой — не более чем вторую производную по
x
, получаем:
τ
0
∂P
∂t
=
ε
2
+ (
τ
0
λ
)
2
2
∂
2
P
∂x
2
−
(
ε
−
τ
0
λ
)
∂P
∂x
;
∂P
(
x, t
)
∂t
=
(
μ
2
+
λ
2
)
2
λ
∂
2
P
(
x, t
)
∂x
2
−
(
μ
−
λ
)
∂P
(
x, t
)
∂x
.
Вторую производную по
t
можно исключить, поскольку по сво-
ему смыслу она описывает процесс, при котором сами заявки при
обработке становятся источниками дополнительных заявок. Посколь-
ку функция
P
(
x, t
)
является непрерывной, перейдем от вероят-
ности
P
(
x, t
)
к плотности вероятности
ρ
(
x, t
)
, проведя операцию
ρ
(
x, t
) =
∂P
(
x, t
)
/∂x
, что позволит сформулировать следующую гра-
ничную задачу.
При числе заявок в узле
x
=
L
он прекращает работу. Вероятность
обнаружения такого узла будет отлична от нуля. Однако плотность
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 3 97


